Section: New Results
Perception and Situation Awareness in Dynamic Environments
Sensor Fusion for state parameters identification
Participants : Agostino Martinelli, Chiara Troiani.
General theoretical results
We continued to investigate the visual-inertial structure from motion problem by further addressing the two important issues of observability and resolvability in closed form. Regarding the first issue, we extended our previous results published last year on the journal of Transaction on Robotics [44] by investigating the case when the visual sensor is not extrinsically calibrated. In order to deal with this case, we must augment the state to be estimated by including all the parameters that characterize the extrinsic camera calibration, i.e., the six parameters that describe the relative transformation between the frame attached to the camera and the frame attached to the Inertial Measurement Unit (IMU). On the other hand, because of the larger size of the resulting state, it became prohibitive a direct application of the method that we introduced two years ago (see [43] ) in order to discover the observability properties for this new state. For this reason, our first novel contribution during this year was the introduction of new methodologies able to significantly reduce the computational burden demanded by the implementation of the method in [43] . These methodologies have been published in [22] and a deeper description of their use is currently under revision on the journal Foundations and Trends in Robotics. The new results obtained by using these methodologies basically state that also the new six parameters that describe the camera extrinsic calibration are observable. Finally, we started a new research that in the literature is known as the Unknown Input Observability (UIO) and it is investigated by the automatic control community. We started this new research since we investigated the observability properties of the visual inertial structure from motion as the number of inertial sensors is reduced. Specifically, instead of considering the standard formulation, which assumes a monocular camera, three orthogonal accelerometers and three orthogonal gyroscopes, the considered sensor suit only consists of a monocular camera and one or two accelerometers. This analysis has never been provided before. A preliminary investigation seems to prove that the observability properties of visual inertial structure from motion do not change by removing all the three gyroscopes and one accelerometer. By removing a further accelerometer, if the camera is not extrinsically calibrated, the system loses part of its observability properties. On the other hand, as the camera is extrinsically calibrated, the system maintains the same observability properties as in the standard case. This contribution clearly shows that the information provided by a monocular camera, three accelerometers and three gyroscopes is redundant. Additionally, it provides a new perspective in the framework of neuroscience to the process of vestibular and visual integration for depth perception and self motion perception. Indeed, the vestibular system, which provides balance in most mammals, consists of two organs (the utricle and the saccule) able to sense the acceleration only along two independent axes (and not three). In order to analyze these systems with a reduced number of inertial sensors, we had to consider control systems where some of the inputs are unknown. Indeed, the visual-inertial structure from motion problem can be characterized by a control system where the inputs are known thanks to the inertial sensors. Hence, to deal with the visual-inertial structure from motion as the number of inertial sensors is reduced, we had to introduce a new method able to address the more general UIO problem. We believe that our solution to the UIO is general and this is the reason because we started this new research domain in control theory. Preliminary results are currently under revision on the journal Foundations and Trends in Robotics and we also plan to present them at the next ICRA conference. Regarding the second issue, i.e., the problem resolvability in closed form, a new simple closed form solution to visual-inertial structure from motion has been derived. This solution expresses the structure of the scene and the motion only in terms of the visual and inertial measurements collected during a short time interval. This allowed us to introduce deterministic algorithms able to simultaneously determine the structure of the scene together with the motion without the need for any initialization or prior knowledge. Additionally, the closed-form solution allowed us to identify the conditions under which the visual-inertial structure from motion has a finite number of solutions. Specifically, it is shown that the problem can have a unique solution, two distinct solutions or infinite solutions depending on the trajectory, on the number of point-features and on their arrangement in the 3D space and on the number of camera images. All the results have been published on the international journal of Computer Vision [15] .
Applications with a Micro Aerial Vehicle
We introduced a new method to localize a micro aerial vehicle (MAV) in GPS denied environments and without the usage of any known pattern [26] . The method exploits the planar ground assumption and only uses the data provided by a monocular camera and an inertial measurement unit. It is based on a closed solution which provides the vehicle pose from a single camera image, once the roll and the pitch angles are obtained by the inertial measurements. Specifically, the vehicle position and attitude can uniquely be determined by having two point features. However, the precision is significantly improved by using three point features. The closed form solution makes the method very simple in terms of computational cost and therefore very suitable for real time implementation. Additionally, because of this closed solution, the method does not need any initialization. Results of experimentation show the effectiveness of the proposed approach.
We proposed a novel method to estimate the relative motion between two consecutive camera views, which only requires the observation of a single feature in the scene and the knowledge of the angular rates from an inertial measurement unit, under the assumption that the local camera motion lies in a plane perpendicular to the gravity vector [27] . Using this 1-point motion parametrization, we provide two very efficient algorithms to remove the outliers of the feature-matching process. Thanks to their inherent efficiency, the proposed algorithms are very suitable for computationally-limited robots. We test the proposed approaches on both synthetic and real data, using video footage from a small flying quadrotor. We show that our methods outperform standard RANSAC-based implementations by up to two orders of magnitude in speed, while being able to identify the majority of the inliers.
A new formulation of the Bayesian Occupancy Filter : an hybrid sampling based framework
Participants : Lukas Rummelhard, Amaury Nègre.
The Bayesian Occupancy Filter (BOF) is a discretized grid structure based bayesian algorithm, in which the environment is subdivised in cells to which random variables are linked. These random variables represent the state of occupancy and the motion field of the scene, without any notion of object detection and tracking, making the updating part of the filter an evaluation of the distribution of these variables, according to the new data acquisition. In the classic representation of the BOF, the motion field of each cell is represented as a neighborhood grid, the probability of the cell moving from the current one to another of the neighborhood being stocked in an histogram. If this representation is convenient for the update, since the potential antecedents of any cell is exactly determined by the structure, and so the propagation model is easily parallelizable, it also raises determinant issues :
-
the structure requires the process rate to be constant, and a priori known.
-
in the case of a moving grid, such as an application of car perception, many aliasing problems can appear, not only in the occupation grid, but in the motion fields of cells. A linear interpolation in 4-dimension field to fill each value of the histograms can quickly become unreasonable.
-
to be able to match the slowest moves in the scene and the tiniest objects, the resolution of the grid and the motion histogram must be the high. On the other hand, since the system must be able to evaluate the speed of highly dynamic objects (typically, a moving car), the maximum encoded speed is to be high as well. This results in a necessary huge resolution grid, which prevent the system from being used with satisfying results on an embedded device. This huge grid is also mostly empty (most of the motion field histogram for a occupied cell will be empty). On top of that, the perception system being used to represent the direct environment of a moving car, the encoded velocity is a relative velocity, which implies, if we consider the maximal speed of a car to be , to maintain a motion field able to represent speeds from to . The necessity of such a sized structure is a huge limitation of practical use of the method.
Considering those limitations, a new way to represent the motion field has been developped. To do so, a new formulation of the BOF has been elaborated. This new version allow to introduce in the filter itself a distinction between static and dynamic parts, and so adapt the computation power. The main idea of this new representation is to mix two forms of sampling : a uniform one, represented as a grid, for the static objects and the empty areas, and a non uniform one, based on particles drawn from dynamic regions. The motion field in a cell will be represented as a set of samples from the distribution for values which are not null, and a weight given to the static hypothesis. The use of a set of samples to represent the motion field leads to a important decrease of the needed memory space, as well as the classification between dynamic objects and static objects or free areas. In the updating process, the antecedent of a cell can be either from the static configuration or from the dynamic configuration, which are both way easier to project in the new reference frame of the moving grid. The first results are stimulating, in term of occupancy evaluation and mostly in term of velocity prediction, being way more accurate and responsive than the older version. Those improvements will soon be presented in detail in upcoming papers, one being currently in the process of redaction.
|


DATMO
Participants : Dung Vu, Mathias Perrollaz, Amaury Nègre.
In the current work, we have been developing a general framework for tracking multiple targets from lidar data.
In the past decades, multiple target tracking has been an active research topic. When object observations are known, object tracking becomes a data association (DA) problem. Among popular DA methods, multiple hypothesis tracking (MHT) is widely used. MHT is a multi-frame tracking method that is capable of handling ambiguities in data association by propagating hypotheses until they can be solved when enough observations are collected. The main disadvantage of MHT is its computational complexity since the number of hypotheses grows exponentially over time. The joint probabilistic data association (JPDA) filter is more efficient but prone to make erroneous decision since only single frame is considered and the association made in the past is not reversible. Other sequential approaches using particle filters share the same weakness that they cannot reverse time back when ambiguities exist. All DA approaches mentioned above requires a strong assumption of one-to-one mapping between targets and observations which is usually violated in real environments. For instance, a single object can be seen by several observations due to occlusion, or multiple moving objects can be merged into a single observation when moving closely.
In the research, we propose a new data association approach that deals with split/merge nature of object observations. In addition, our approach also tackles ambiguities by taking into account a sequence of observations in a sliding window of frames. To avoid the high computational complexity, a very efficient Markov Chain Monte Carlo (MCMC) technique is proposed to sample and search for the optimum solution in the spatio-temporal solution space. Moreover, various aspects including prior information, object model, motion model and measurement model are explicitly integrated in a theoretically sound framework.
Visual recognition for intelligent vehicles
Participants : Alexandros Makris, Mathias Perrollaz, Christian Laugier.
We have developped an object class recognition method. The method uses local image features and follows the part-based detection approach. It fuses intensity and depth information in a probabilistic framework. The depth of each local feature is used to weigh the probability of finding the object at a given distance. To train the system for an object class, only a database of images annotated with bounding boxes is required, thus automatizing the extension of the system to different object classes. We apply our method to the problem of detecting vehicles from a moving platform. The experiments with a data set of stereo images in an urban environment show a significant improvement in performance when using both information modalities.
In 2013, the method has been published in IEEE Transactions on Intelligent Transportation Systems [14] .
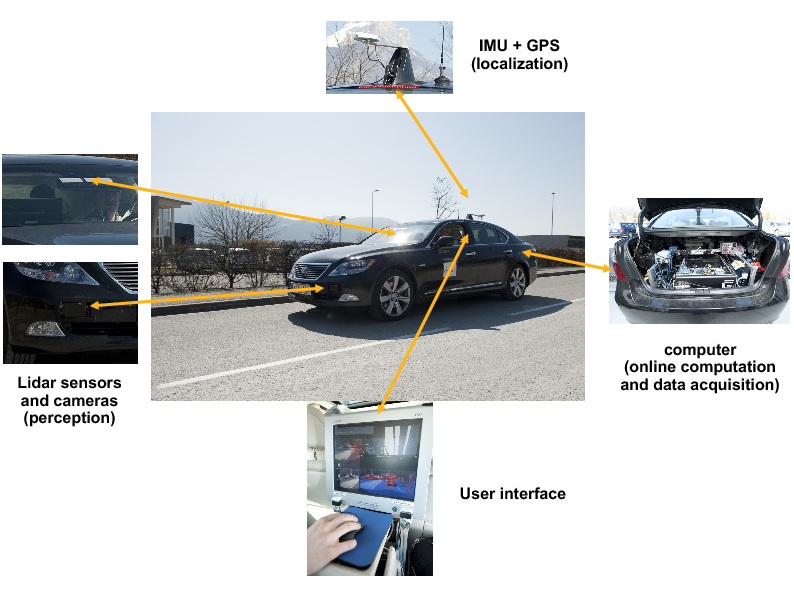
Experimental platform for road perception
Experimental platform material description
Our experimental platform for road perception is shown in Figure 2 . This platform is a commercial Lexus car LS600h equipped with a variety of sensor, including two IBEO Lux lidars placed toward the edges of the front bumper, a TYZX stereo camera plus a high resolution color camera situated behind the windshield, and an Xsens MTi-G inertial sensor with GPS. To do online data computation and data acquisition, a standard computer is located on the back of the car.
This platform allows us to conduct experimentation and data acquisition in various road environments (country roads, downtown and highway), at different time of the day, with various driving situations (light traffic, dense traffic, traffic jams).
|
Software architecture
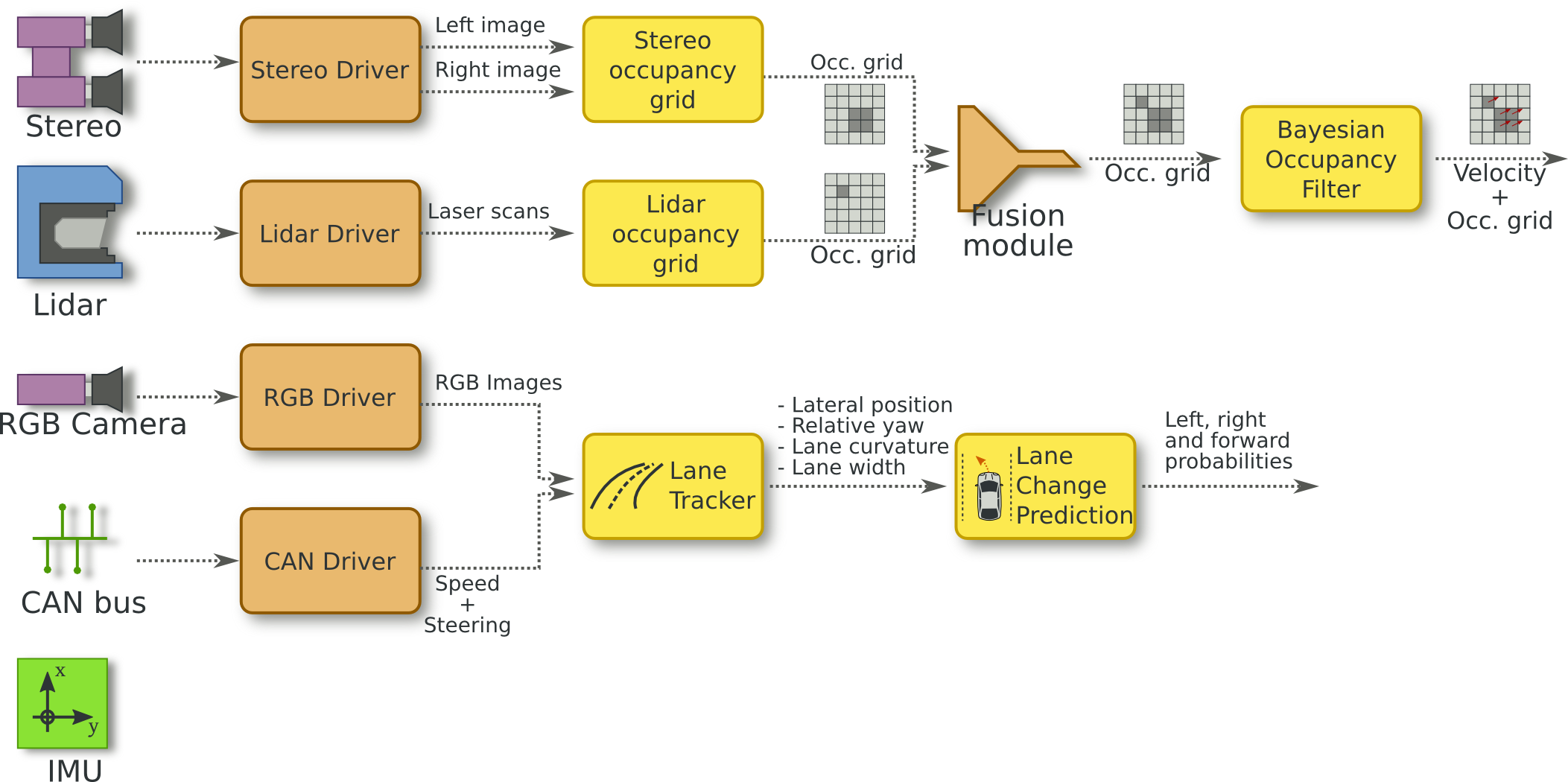
The perception and situation awareness software architecture is integrated in the ROS framework. ROS (http://www.ros.org ) is an open source robotics middleware designed to be distributed and modular. For the Lexus platform, we developed a set of ROS module for each sensor and for each perception component. Each perception module can be dynamically connected with the required drivers or other perception modules. The main architecture of the perception components is illustrated on Figure 3 .
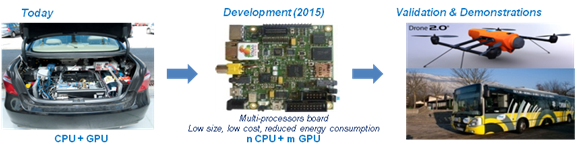
Software and Hardware Integration for Embedded Bayesian Perception
Participants : Mathias Perrollaz, Christian Laugier, Qadeer Baig, Dizan Vasquez, Lukas Rummelhard, Amaury Nègre.
The objective of this recently started research work is to re-design in a highly parallel fashion our Bayesian Perception approach for dynamic environments (based on the BOF concept), in order to deeply integrate the software components into new multi-processor hardware boards. The goal is to miniaturize the software/hardware perception system (i.e., to reduce the size, the load, the energy consumption and the cost, while increasing the efficiency of the system).
For supported this research, we began to work in the “Perfect” project. This project, included in the IRT-Nano program, involves the CEA-LETI DACLE lab and ST-Microelectronics. Perfect is focusing onto the second integration objectives (6 years) and the development of integrated open platforms in the domain of transportation (vehicle and infrastructure) and in a second step in the domain of health sector (mobility of elderly and handicapped people, monitoring of elderly people at home…). The objective of e-Motion in this project is to transfer and port its main Bayesian perception modules from traditional computing system to embedded low-power multi-processors board. The targeted board is a STHorm from ST Microelectronics which is has a many-core architecture with a very low consumption. In 2013 we worked with the CEA to obtain a first implementation of the Bayesian occupancy grid filter on STHorm. Those preliminary results demonstrated the feasibility of the concepts but highlighted some key points to improve such as the memory footprint we need to reduce to obtain real-time accurate results.