

Section: Software and Platforms
Hardware
Poppy Platform
Participants : Matthieu Lapeyre [correspondant] , Pierre Rouanet, Jonathan Grizou, Pierre-Yves Oudeyer [supervisor] .
Main goals :
No current platform (Nao [87] , Darwin Op [88] , Nimbro Op [126] , HRP-2, ...) does offer both a adapted morphology in the sense of allowing physical interaction (safe, compliant, playful) and optimized for walking. So to explore these challenges we have decided to build a new bio-inspired humanoid robotic platform, called Poppy, which provides some of the software and hardware features needed to explore both social interaction and biped locomotion for personal robot. It presents the following main features to make it an interesting platform to study how the combination of morphology and social interaction can help the learning:
-
Design inspired from the study of the anatomy of the human body and its bio-mechanic
-
Dynamic and reactive: we try to keep the weight of the robot as low as possible (geometry of the pieces and smaller motors)
-
Social interaction: screen for communication and permits physical interaction thanks to compliance
-
Study of the morphology of the leg to improve the biped walking
-
Practical platform: low cost, ease of use and easy to reproduce
Overview :
Poppy platform (Figure 16 ) is a humanoid, it is 84cm tall for 3 kg. It has a large sensor motors space including 25 dynamical motors (MX-28 and AX-12), force sensors under its feet and some extra sensors in the head: 2 HD-wide angle-cameras, stereo-micros and an inertial central unit (IMU 9DoF) plus a large LCD Screen (4 inch) for visual communication (e.g. emotions, instructions or debug). The mechanical parts were designed and optimized to be as light as possible while maintaining the necessary strength. For this, the choice of a lattice beam structure manufactured with 3Dprinting polyamide was used.
The poppy morphology is designed based on the actual human body. We have deeply studied the biomechanics of the human body and have extracted some interesting features for humanoid robotics. This inspiration is expressed in the whole structure (e.g. the limb proportions) and in particular in the trunk and legs.
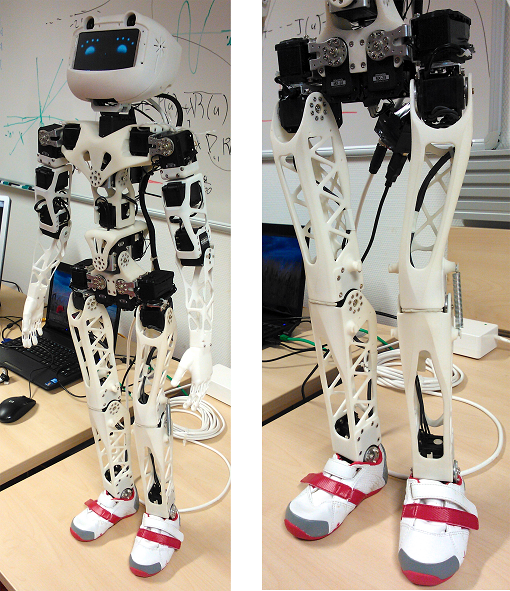
Poppy uses the bio-inspired trunk system introduced by Acroban [101] . These five motors allow it to reproduce the main changes brought by the human spine. This feature allows the integration of more natural and fluid motion while improving the user experience during physical interactions. In addition, the spine plays a fundamental role in bipedal walking and postural balance by actively participating in the balancing of the robot.
The legs were designed to increase the stability and agility of the robot during the biped walking by combining bio-inspired, semi-passive, lightweight and mechanical-computation features. We will now describe two examples of this approach:
The architecture of the hips and thighs of Poppy uses biomechanical principles existing in humans. The human femur is actually slightly bent at an angle of about 6 degrees. In addition, the implantation of the femoral head in the hip is on the side. This results in a reduction of the lateral hip movement needed to move the center of gravity from one foot to another and a decrease in the lateral falling speed. In the case of Poppy, the inclination of its thighs by an angle of 6 degrees causes a gain of performance of more than 30% for the two above mentioned points.
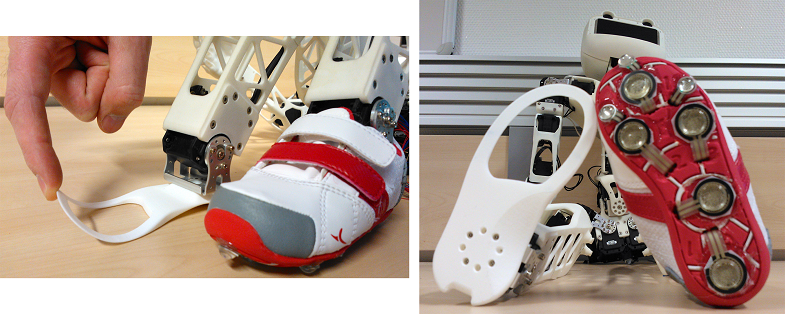
Another example is Poppy's feet. Poppy has the particularity of having small feet compared to standard humanoids. It has humanly proportioned feet (ie about 15% of its total size).It is also equipped with compliant toes joints (see Figure 17 .a). We believe that this feet involve two keys features to obtain a human-like and efficient walking gait. However, that raises problems regarding balance because the support polygon is reduced. We decided to add pressure sensors under each foot in order to get accurate feedback of the current state of the robot (see Figure 17 .b).
|
Open source release :
To allow the distribution in the robotic community, we have decided to make Poppy an open platform. So the software and the hardware are open source. They have each a repository. The PyPot library is under GPLV3 license and is available on a bitbucket repository (https://github.com/poppy-project/pypot ). The hardware, Solidworks files and STL needed to print the robot are available under a Creative Commons BY+SA+NC license on a private GrabCAD Workbench repository. People can request access to the hardware repository on the Poppy website (http://www.poppy-project.org/open-platform/ ).
The platform is currently under beta-testing meaning that we let the community grows little by little to ensure a good support of interesting projects.
For now, there are about 200 people on the GrabCAD project. They have access to all files needed to print the robot. There is also about 60 beta testers. They have access to a private section on the website with documentation and a forum for support.
Several of them are already doing a great work both by reporting bugs and managing to build the robot outside the lab. We are trying to work closely with them as they are a great source of feedback to improve the platform before a more wide distribution.
Impact in the community
Poppy has been release open source the 15/10/2013. The announcement has been done by Pierre Yves Oudeyer during the Lift 2013 conference. To prepare this event, the website and a overview video were made. The video, accessible here (http://vimeo.com/76917854 ) has reached about 40K views until now.
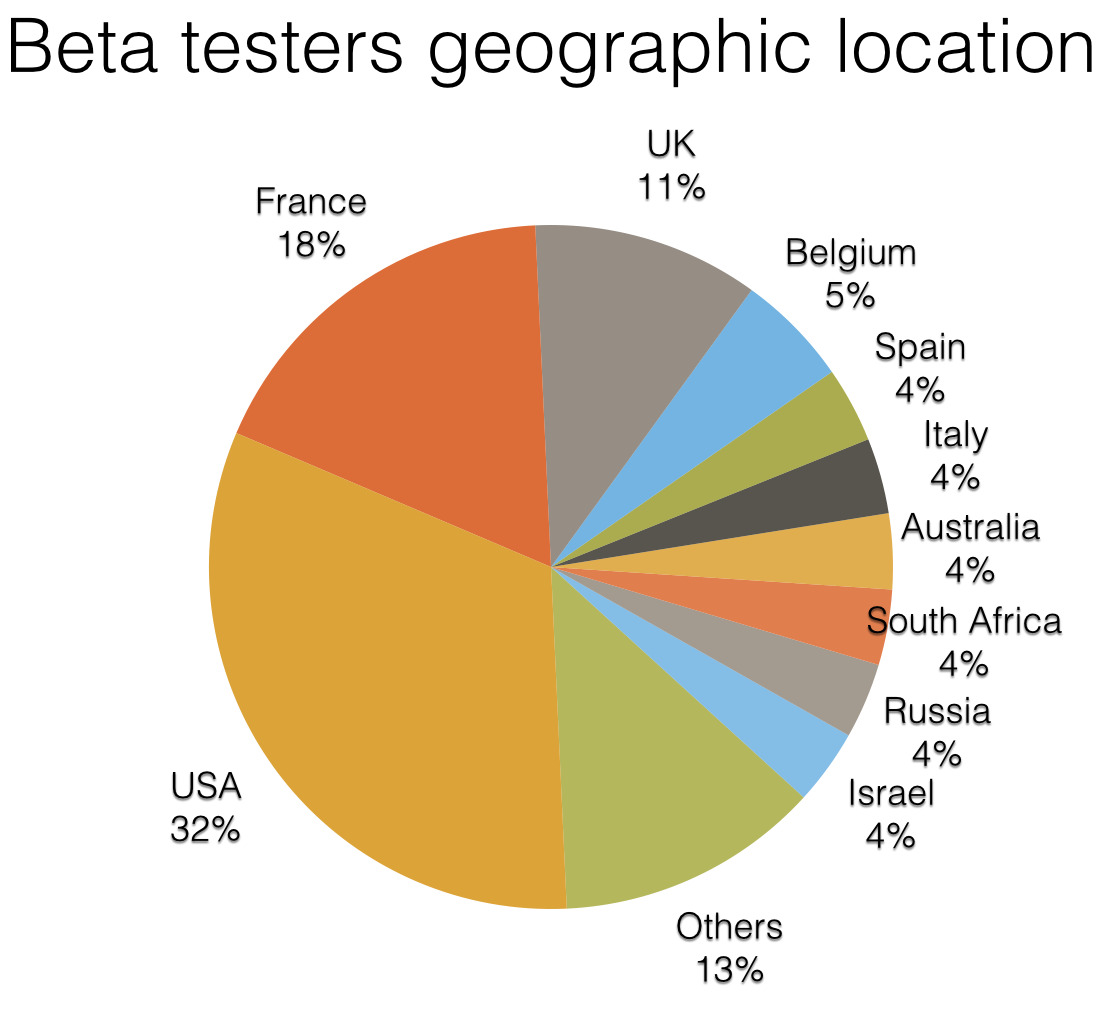
A part of the audience are technology-enthusiast people (about 50% on grabCAD), interested by the fact Poppy is 3D printable and so, highly customizable. More interesting, we received a large number of beta request from various applications domains (see 18 ) around the world (see 19 ).
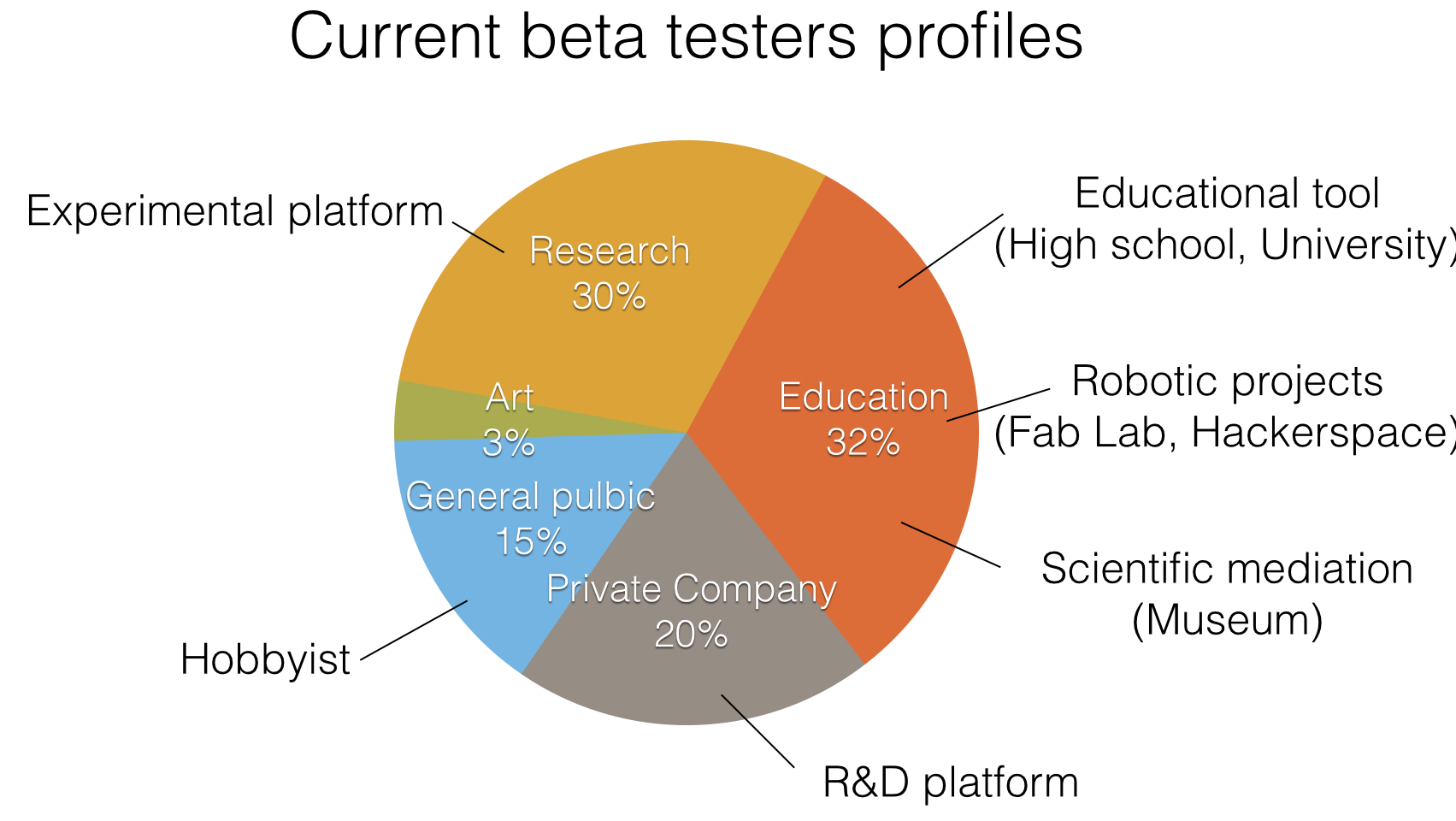
Education:
We receive a lot of request from Fablab around the world (France, USA, New-Zeland, South Africa,...). All have great educational projects for teaching robotics, mechanics and computer science to children. Some of them are close beta testers and we have weekly interactions. In the same topic, several schools, engineering schools and universities showed interest to use Poppy as experimental support. One of our close beta tester is a Bordeaux high school. They are planning to use Poppy as support for mechanics, computer sciences but also architecture or philosophy.
Art:
A current art project is under construction. A residence with an artist, a dancer and us will take place on the 24/02/2014 to the 05/03/2014. It comes to artistically invest humanoid robotics and thereby examine the relationship of the body to the digital world. The encounter between art and science generates potential new ideas for both disciplines who find themselves at the crossroads of questions relating to the gesture, movement and body. The Poppy Project is focused on morphological and motor aspects in a context human-robot interface. The look of an artist and the movements of a dancer are testing this interface with an unprecedented and direct manere.
Research:
A large number of researchers showed interest in the platform. Most of them are interested to use it as a experimental tool. They want to address challenges such as balance and walking control, use of force controlled motors, explore human-robot interactions. On this last topic, the Bristol robotic lab target to use tele-operation to investigate what factors are important in terms of appearance and behaviour for credible and trustworthy interaction. For this purpose, they will develop functional hands for gesture and grasping task.
Next step:
We are currently working with beta testers on several improvements to make Poppy more accessible, more easy to use and more polyvalent. Two internship students will arrive on the project to work on the embedded electronic and on the feet design. We are targeting to release the final version during the summer 2014. Also we are thinking about the creation of a "Poppy pack" including all necessary components and tools to easily build the robot.
Another very important point is the community management. We are currently adding new collaborative tools on the Poppy website. These tools are tested with beta testers. The challenge is to offer the good tools to provide an efficient support to future users and to encourage people to contribute. This work is done in collaboration with Stephane Ribas (D2T inria Grenoble).