

Section: Software and Platforms
ViSP: a visual servoing and tracking software library
Participants : Fabien Spindler [correspondant] , Aurélien Yol, Eric Marchand, François Chaumette.
Since 2005, we develop and release under the terms of the GPLv2 licence, ViSP, an open source library available from http://team.inria.fr/lagadic/visp/visp.html . It allows fast prototyping of visual tracking and visual servoing tasks. ViSP was designed to be independent with the hardware, to be simple to use, expandable and cross-platform.
ViSP allows to design vision-based tasks for eye-in-hand and eye-to-hand visual servoing that contains the most classical visual features that are used in practice. It involves a large set of elementary positioning tasks with respect to various visual features (points, segments, straight lines, circles, spheres, cylinders, image moments, pose,...) that can be combined together, and image processing algorithms that allows tracking of visual cues (dots, segments, ellipses,...) or 3D model-based tracking of known objects. Simulation capabilities are also available. ViSP and its full functionalities are presented in Fig. 1 and described in [6] .
|
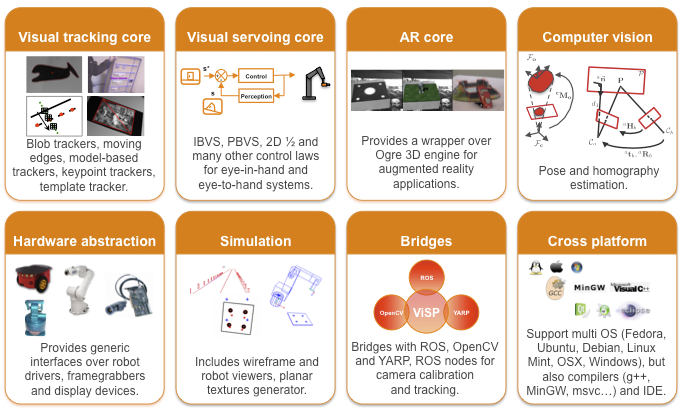
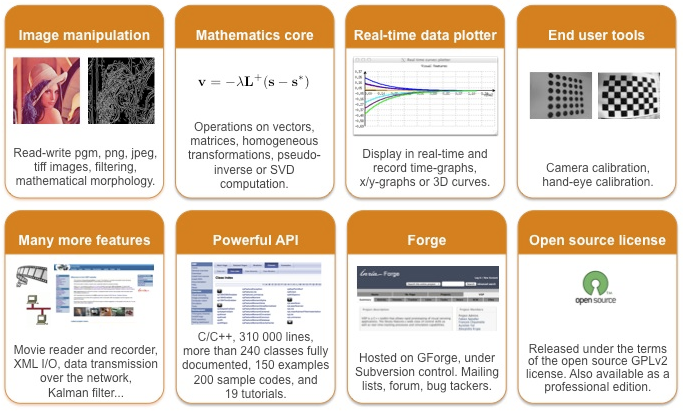
This year, we continued our efforts to improve the software by increasing the compatibility with exotic platforms, fixing issues, and by introducing an hybrid scheme in the model-based tracker to take advantage of texture. We also improved the documentation by providing tutorials covering the main capabilities of the software. Two releases were produced, one in February downloaded 1000 times and the other in July downloaded 730 times. With the help of the community, the last release was also packaged for Ubuntu 13.10. A new template tracker developed during A. Dame's Ph.D. was recently introduced and will be available in the next release.
Concerning ROS community, all the existing packages in “vision_visp ” ROS stack (see http://www.ros.org/wiki/vision_visp ) were updated and ported to catkin build system. To ease ViSP usage in the ROS framework, the last release was packaged for ROS.
ViSP is used in research labs in France, USA, Japan, Korea, India, China, Lebanon, Italy, Spain, Portugal, Hungary, Canada. For instance, it is used as a support in graduate courses at IFMA Clermont-Ferrand, University of Picardie in Amiens, Télécom Physique in Strasbourg and ESIR in Rennes.