

Section: New Results
State estimation: analysis and forecast
One major objective of Clime is the conception of new methods of data assimilation in geophysical sciences. Clime is active on several challenging aspects: non-Gaussian assumptions, multiscale assimilation, minimax filtering, etc.
An iterative ensemble Kalman smoother
Participants : Marc Bocquet, Pavel Sakov [BOM, Australia] .
The iterative ensemble Kalman filter (IEnKF) was proposed for improving the performance of the ensemble Kalman filter on strongly nonlinear geophysical models. IEnKF can be used as a lag-one smoother and extended to a fixed-lag smoother: the iterative ensemble Kalman smoother (IEnKS). IEnKS is an ensemble variational method. It does not require the use of the tangent of the evolution and observation models, nor the adjoint of these models: the required sensitivities (gradient and Hessian) are computed from the ensemble. Looking for the optimal performance, we consider a quasi-static algorithm, out of the many possible extensions. IEnKS was explored on the Lorenz'95 model and on a 2D turbulence model. As a logical extension of IEnKF, IEnKS significantly outperforms the standard Kalman filters and smoothers in strongly nonlinear regimes. In mildly nonlinear regimes (typically synoptic scale meteorology), its filtering performance is marginally but clearly better than the standard ensemble Kalman filter, and it keeps improving as the length of the temporal data assimilation window is increased. For long windows, its smoothing performance very significantly outranks the standard smoothers, which is believed to stem from the variational but flow-dependent nature of the algorithm. For very long windows, the use of a multiple data assimilation variant of the scheme, where observations are assimilated several times, is advocated. This paves the way for finer re-analysis freed from the static prior assumption of 4D-Var, but also partially freed from the Gaussian assumptions that usually impede standard ensemble Kalman filtering and smoothing.
Modeling and assimilation of lidar signals
Participants : Yiguo Wang [CEREA] , Karine Sartelet [CEREA] , Marc Bocquet, Patrick Chazette [LSCE, France] .
In this study, we investigate the ability of the chemistry transport model (CTM) Polair3D of the air quality platform Polyphemus to simulate lidar backscattered profiles from model aerosol concentration outputs. This investigation is an important pre-processing stage of data assimilation (validation of the observation operator). To do so, simulated lidar signals are compared to hourly lidar observations performed during the MEGAPOLI (Megacities: Emissions, urban, regional and Global Atmospheric POLlution and climate effects, and Integrated tools for assessment and mitigation) summer experiment in July 2009, when a ground-based mobile lidar was deployed around Paris on-board a van. The comparison is performed for six days (1, 4, 16, 21, 26 and 29 July 2009), corresponding to different levels of pollution and different atmospheric conditions. Overall, Polyphemus reproduces well the vertical distribution of lidar signals and their temporal variability, especially for 1, 16, 26 and 29 July 2009. Discrepancies on 4 and 21 July 2009 are due to high-altitude aerosol layers, which are not well modeled. In the second part of this study, two new algorithms for assimilating lidar observations based on the optimal interpolation method are presented. One algorithm analyses PM (particulate matter with diameter less than 10 ) concentrations. Another analyses PM (particulate matter with diameter less than 2.5 ) and PM (particulate matter with a diameter higher than 2.5 and lower than 10 ) concentrations separately. The aerosol simulations without and with lidar Data Assimilation (DA) are evaluated using the Airparif (a regional operational network in charge of air quality survey around the Paris area) database to demonstrate the feasibility and usefulness of assimilating lidar profiles for aerosol forecasts. The evaluation shows that lidar DA is more efficient at correcting PM than PM, probably because PM is better modeled than PM. Furthermore, the algorithm which analyzes both PM and PM provides the best scores for PM. The averaged root-mean-square error (RMSE) of PM is 11.63 with DA (PM and PM), compared to 13.69 with DA (PM) and 17.74 without DA on 1 July 2009. The averaged RMSE of PM is 4.73 with DA (PM and PM), against 6.08 with DA (PM) and 6.67 without DA on 26 July 2009.
Assimilation of lidar signals: application to aerosol forecasting
Participants : Yiguo Wang [CEREA] , Karine Sartelet [CEREA] , Marc Bocquet, Patrick Chazette [LSCE] .
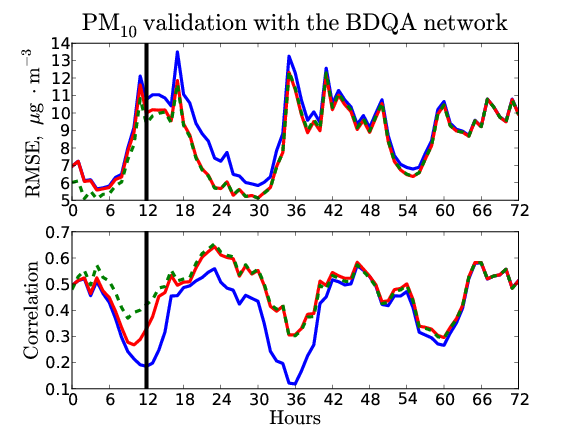
This study represents a new application of assimilating lidar signals to aerosol forecasting. It aims at investigating the impact of a ground-based lidar network on the analysis and short-term forecasts of aerosols through a case study in the Mediterranean basin. To do so, we employ a Data Assimilation (DA) algorithm based on the optimal interpolation method developed in the Polair3D chemistry transport model (CTM) of the Polyphemus air quality modeling platform. We assimilate hourly averaged normalized range-corrected lidar signals retrieved from a 72 h period of intensive and continuous measurements performed in July 2012 by ground-based lidar systems of the European Aerosol Research Lidar Network (EARLINET). Particles with an aerodynamic diameter lower than 2.5 (PM) and those with an aerodynamic diameter higher than 2.5 but lower than 10 (PM) are analyzed separately using the lidar observations at each DA step. First, we study the spatial and temporal influences of the assimilation of lidar signals on aerosol forecasting. We conduct sensitivity studies on algorithmic parameters, e.g. the horizontal correlation length () used in the background error covariance matrix (50 km, 100 km or 200 km), the altitudes at which DA is performed (0.75–3.5 km, 1.0–3.5 km or 1.5–3.5 km) and the assimilation period length (12 h or 24 h). We find that DA with km and assimilation from 1.0 to 3.5 km during a 12 h assimilation period length leads to the best scores for PM and PM during the forecast period with reference to available measurements from surface networks. Secondly, the aerosol simulation results without and with lidar DA using the optimal parameters ( = 100 km, an assimilation altitude range from 1.0 to 3.5 km and a 12 h DA period) are evaluated using the level 2.0 (cloud-screened and quality-assured) aerosol optical depth data from AERONET, and mass concentration measurements (PM or PM) from the French air quality (BDQA) network and the EMEP-Spain/Portugal network. The results show that the simulation with DA leads to better scores than the one without DA for PM, PM and aerosol optical depth. Additionally, the comparison of model results to evaluation data indicates that the temporal impact of assimilating lidar signals is longer than 36 h after the assimilation period.
Fig. 2 shows the performance of assimilating real lidar data over the Mediterranean sea with a view to forecast particulate matter over France.
|
Local ensemble transform Kalman filter for adaptive optics on extremely large telescopes
Participants : Morgan Gray [LAM, France] , Cyril Petit [ONERA, France] , Sergei Rodionov [LAM, France] , Marc Bocquet, Laurent Bertino [NERSC, Norway] , Marc Ferrari [LAM, France] , Thierry Fusco [LAM and ONERA, France] .
We proposed a new algorithm for an adaptive optics system control law, based on the Linear Quadratic Gaussian approach and a Kalman Filter adaptation with localizations. It allows to handle non-stationary behaviors, to obtain performance close to the optimality defined with the residual phase variance minimization criterion, and to reduce the computational burden with an intrinsically parallel implementation on the Extremely Large Telescopes.