Section: New Results
Human Centered Navigation in the physical world
Social Mapping
Participants : Panagiotis Papadakis, Anne Spalanzani, Christian Laugier.
With robots technology shifting towards entering human populated environments, the need for augmented perceptual robotic skills emerges that complement to human presence. In this integration, perception and adaptation to the implicit human social conventions plays a fundamental role. Toward this goal, we introduce in 2013 a novel methodology to detect and analyse complex spatial interactions of multiple people and encode them in the form of a social map, whose structure is obtained by computing a latent space representation of human proxemic behaviour [32] . In 2014, Panagiotis left to Lagadic-Sophia and we carried on this work by integrating a planning algorithm to validate the perception part on a real robot. This work was published at IROS 2014 [22] .
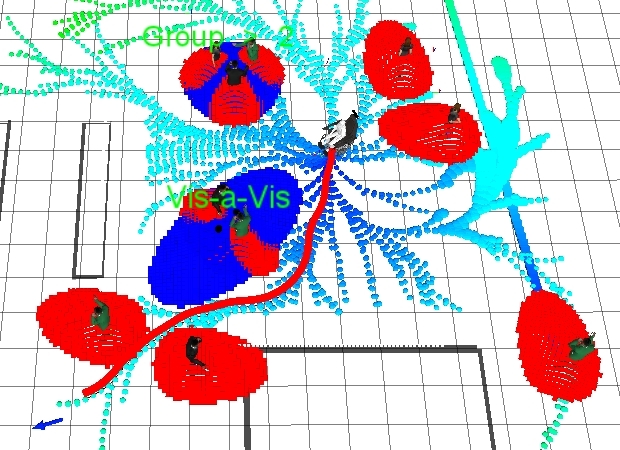
Goal oriented risk based navigation in social and dynamic environment
Participants : Anne Spalanzani, Procopio Silveira-Stein, Gregoire Vignon, Christian Laugier.
Since 2008 we have proposed a new concept to integrate a probabilistic collision risk function linking planning and navigation methods with the perception and the prediction of the dynamic environments [31] . The likelihood of the obstacles' future trajectory and the probability of occupation are used to compute the risk of collision. A social filter was added to give the robot the ability to move in a social way (see Figure 10 ). In 2014, we obtained an Inria ADT(ADT PN2) to optimize and share the RiskRRT algorithm. This work is under development. We published in [15] a survey on human-aware navigation.
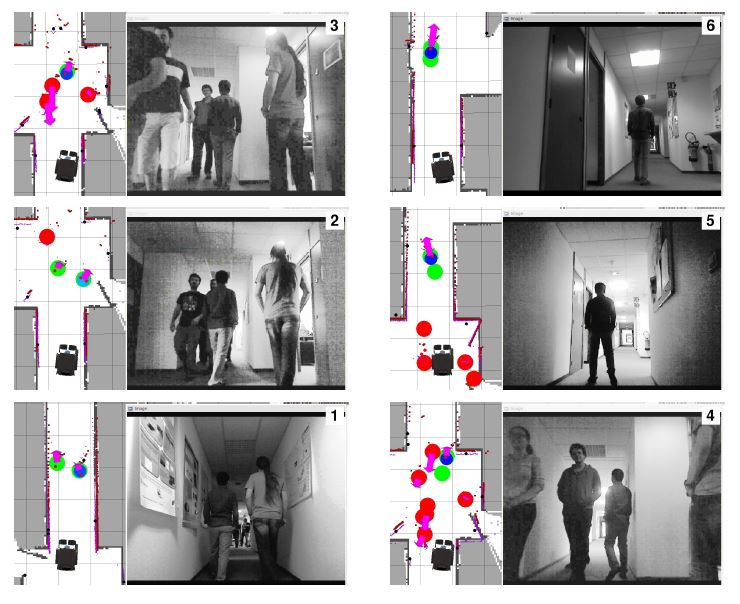
Navigation Taking Advantage of Moving Agents
Participants : Procopio Silveira-Stein, Anne Spalanzani, Christian Laugier.
In this work, we proposes a different form of robotic navigation in dynamic environments, where the robot takes advantage of the motion of pedestrians, in order to improve its own navigation capabilities. The main idea is that, instead of treating persons as dynamic obstacles that should be avoided, they should be treated as special agents with an expert knowledge of navigating in dynamic scenarios. To benefit from the motion of pedestrians, this work proposes that the robot selects and follows them, so it can move along optimal paths, deviate from undetected obstacles, improve navigation in densely populated areas and increase its acceptance by other humans. In 2014, we focused on real experiments (see Figure 11 using the wheelchair and results were published in [16] , [25] , [26] .
|
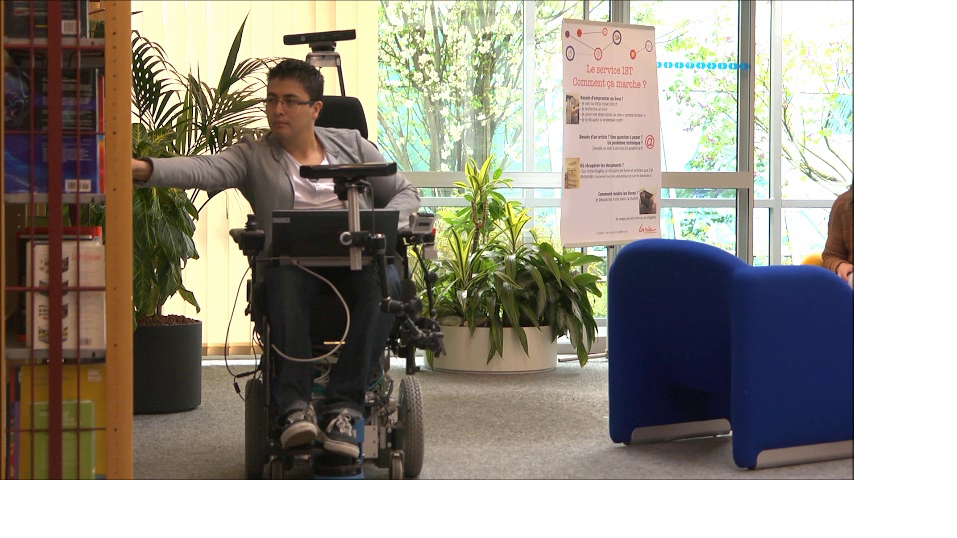
Autonomous Wheelchair for Elders Assistance
Participants : Arturo Escobedo-Cabello, Gregoire Vignon, Anne Spalanzani, Christian Laugier.
The aging of world's population is bringing the need to provide robotic platforms capable to assist elder people to move [33] . It is necessary that such transportation is reliable, safe and comfortable. People with motor disabilities and elders are expected to benefit from new developments in the field of autonomous navigation robotics.
Autonomously driven wheelchairs are a real need for those patients who lack the strength or skills to drive a normal electric wheelchair. The services provided by this kind of robots can also be used to provide a service of comfort, assisting the user to perform difficult tasks as traversing a door, driving in a narrow corridor etc. In 2014, we combined user intention estimation, a navigation using social convention to perform comfortable trajectories (see Figure 12 . Results were published in the IROS conference [19] . Arturo Escobedo defended his phD in october 2014.