

Section: New Results
Attention-Based Navigation
Participants : Thierry Fraichard, Remi Paulin, Patrick Reignier..
|
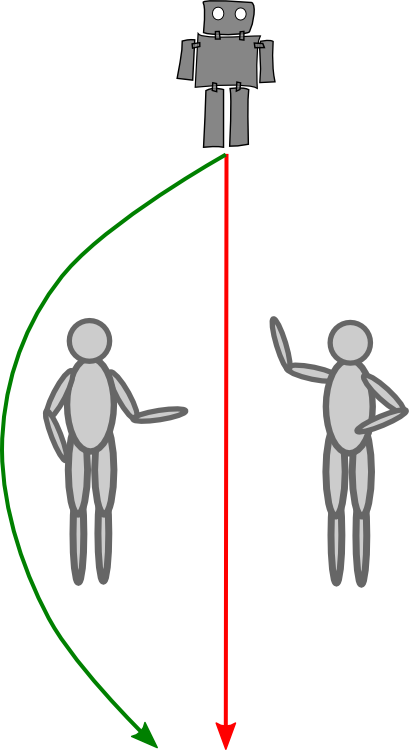
The domain of service-robots is growing fast and has become the focus of many researchers and industrials alike. Their application areas been extremely broad, from logistics to handicap assistance. A large proportion of such robots are expected to share humans' living space and thus must be endowed with navigation capabilities that exceed the standard requirements pertaining to autonomous navigation such as motion safety. In a human populated environment, optimality does not boil down to minimising resources such as time or distance travelled anymore, the robot motion must abide by social/cultural rules and be appropriate, e.g. Fig. 6 .
|
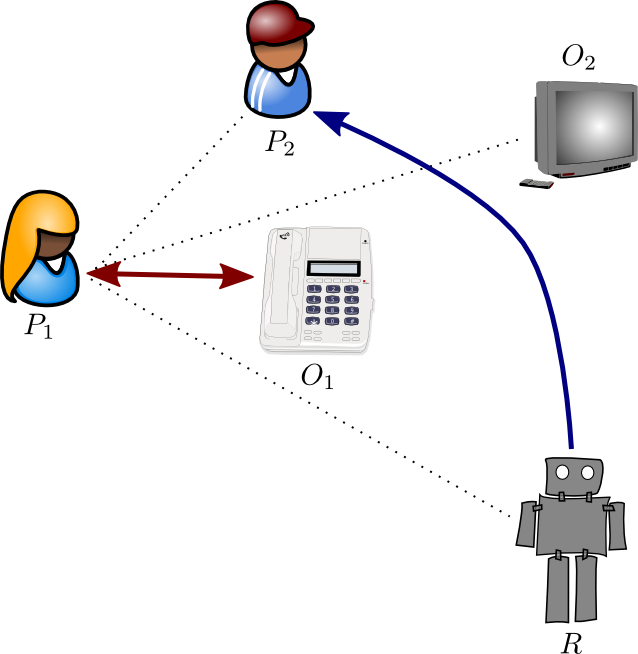
Most of the approaches proposed so far relies upon the definition of so-called social spaces, i.e. regions in the environment that, for different reasons, the persons consider as psychologically theirs. Such social spaces are primarily characterized using either the position of the person, e.g. “Personal space” [42] , or the activity it is currently engaged in, e.g. “Interaction Space” [47] and “Activity Space” [51] . The most common approach is then to define costmaps on such social spaces: the higher the cost, the less desirable it is for the robot to be at the corresponding position. The costmaps are ultimately used for motion planning and navigation purposes. Such approaches are interesting however their spatial nature (being inside or outside the space) make them less suitable when facing more complicated situations, e.g. Fig. 7 . To overcome those limits, we suggest using the psychological concept of attention, which plays a central role when humans navigate around each other. Besides lifting the limits of social spaces, this concept brings a new degree of control over the motion of the robot, namely the invasive and distracting character of the robot motion, which have so far proven hard to tackle with the conventional tools such as social spaces. Beside leading appropriate motion, attention-based navigation enable interaction through motion by predicting the quantity of attention the human will give to the robot.
Building upon a computational model of attention that was earlier proposed in [53] . we have developed the novel concept of attention field. The attention field is straightforward to define: it is a measure of the amount of attention that a given person would allocate to the robot, should the robot be in a given position/state. It is mapping from the state space of the robot to . The attention field can serve as an attention predictor that can be used to predict potential attentional situations. This knowledge can in turn be used to decide what the robot should do in the future depending on its current task.
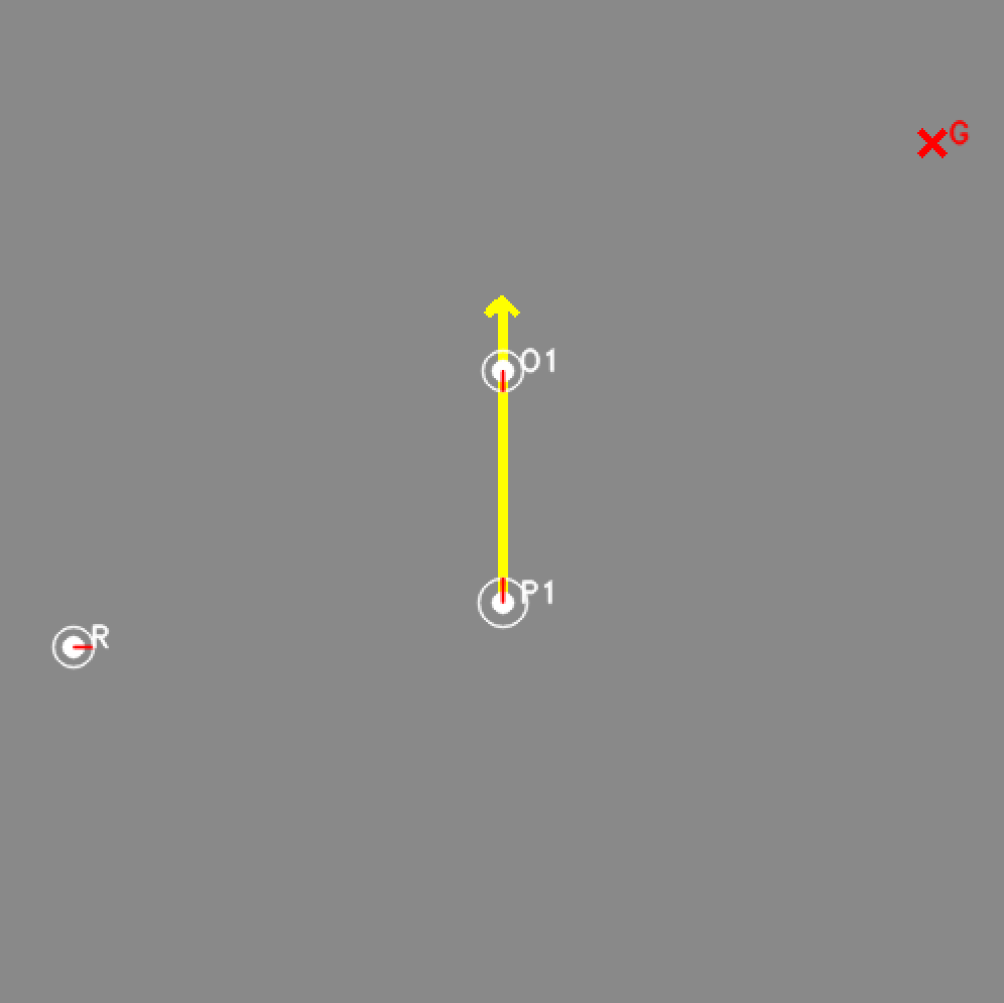
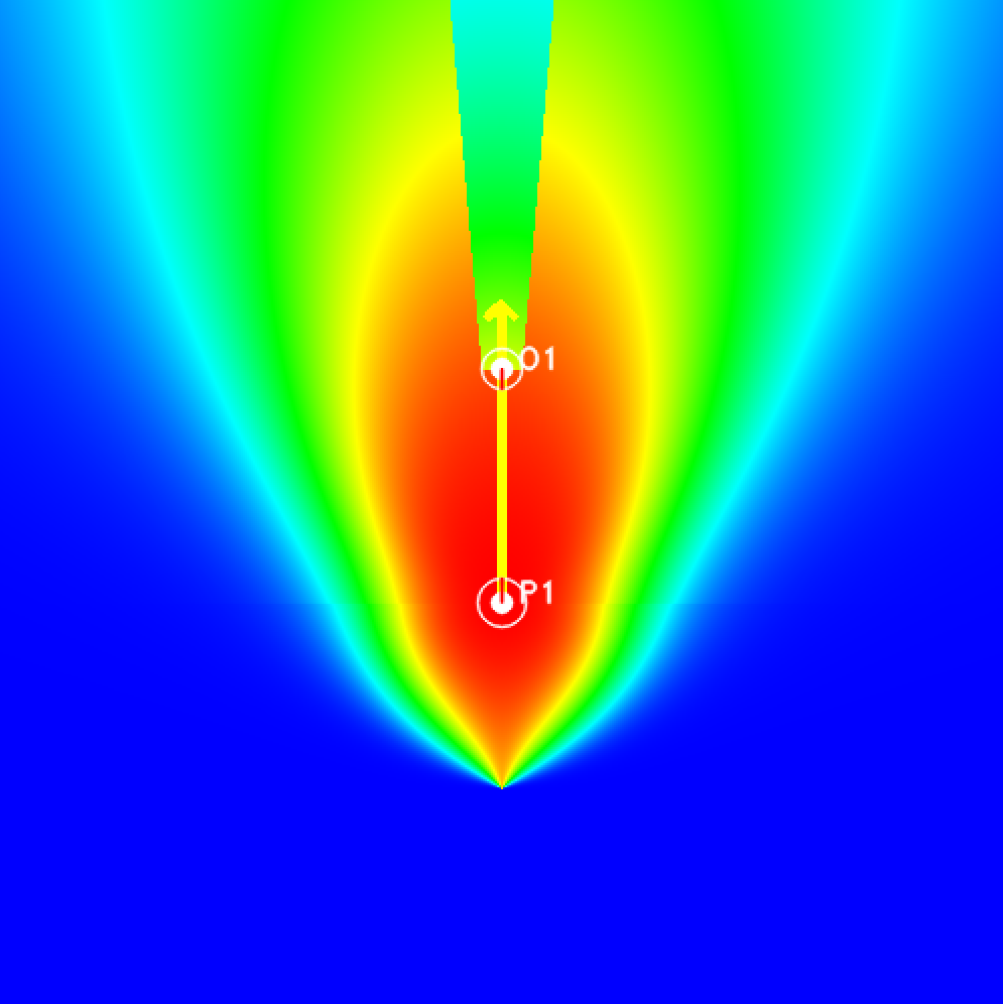
Let us illustrate this on a simple scenario featuring a person, a TV and a robot (denoted by , and in Fig. 8 -left). The person is currently watching the TV: this is his current activity. This activity relates to his intention and is modeled by the yellow vector in Fig. 8 -left that is directed from the person to the TV. Fig. 8 -right depicts the attention field for the person; it is a mapping from to that gives the amount of attention that the person is paying to the robot when it is at a given position . Fig. 8 -right should be interpreted as follows: the warmer the color, the higher the amount of attention given by the person to the robot. It integrates both the visual and auditory perception capabilities of .
In 2014, we have furthered the development of the concept of attention field and demonstrated different ways to use its attention prediction capability on various scenarios. The main results obtained have been reported in a conference article that has been nominated for the Best Paper Award [14] . Work is ongoing to quantify the social “goodness” of the paths provided by our approach, to further the use of the concept of attention on more challenging and dynamic scenarios and to offer an approach to fill the gap between appropriate motion and interaction through motion.