Section: New Results
Crowd motion classification
Participants : Antoine Basset, Charles Kervrann, Patrick Bouthemy.
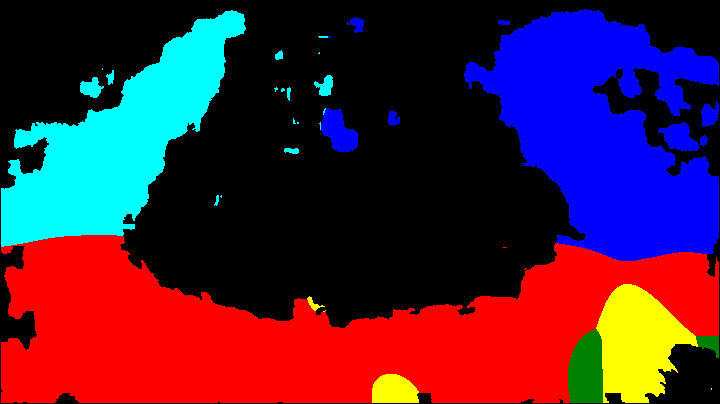
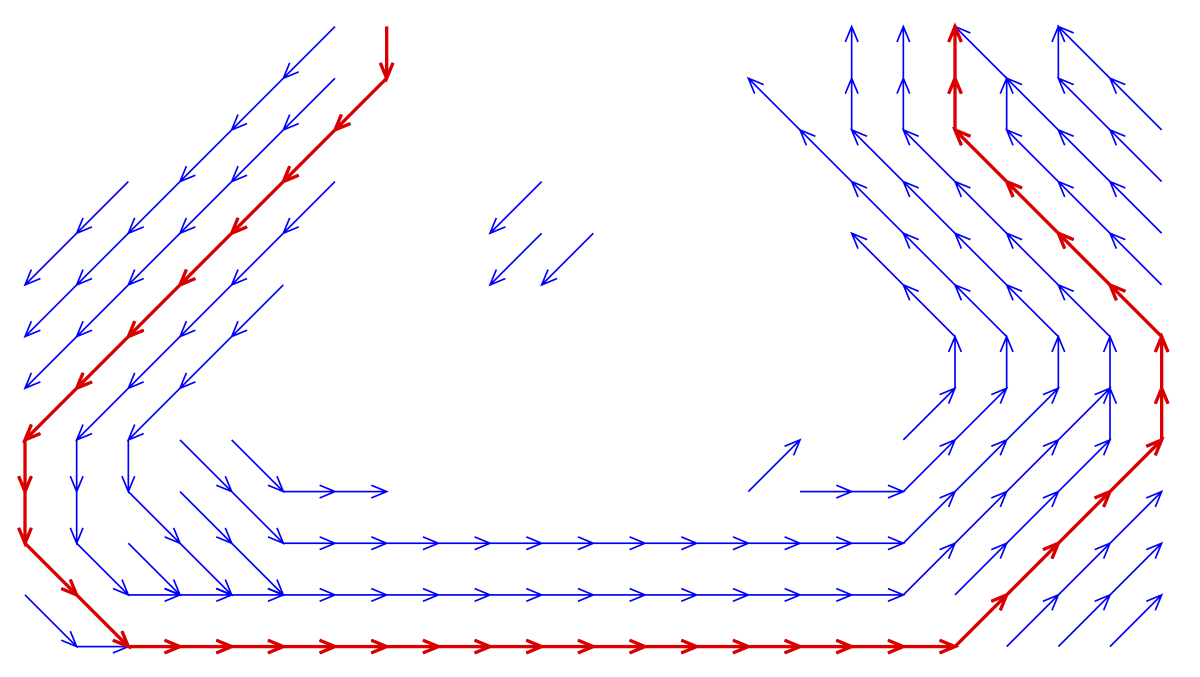
Assessing crowd behaviors from videos is a difficult task while of interest in many applications. We have defined a novel approach which identifies from two successive frames only, crowd behaviors expressed by simple image motion patterns. It relies on the estimation of a collection of sub-affine motion models in the image, a local motion classification based on a penalized likelihood criterion, and a regularization stage involving inhibition and reinforcement factors [17] . The apparent motion in the image of a group of people is assumed to be locally represented by one of the three following motion types: translation, scaling or rotation. The three motion models are computed in a collection of predefined windows with the robust estimation method [48] . At every point, the right motion model is selected owing to the corrected (for small sample size) Akaike information criterion (AICc). To classify the local motion type, the three motion models are further subdivided into a total of eight crowd motion classes. Indeed, scaling refers either to gathering (Convergence) or dispersing people (Divergence). Rotation can be either Clockwise or Counterclockwise. Since our classification scheme is view-based, four image-related translation directions are distinguished: North, West, South, East. Then, to get the final crowd classification, a regularization step is performed, based on a decision tree and involving inhibition for opposed classes such as convergence and divergence. We have also developed an original and simple method for recovering the dominant paths followed by people in the observed scene. It involves the introduction of local paths determined from the space-time average of the parametric motion subfields selected in image blocks. Starting from one given block in the image, we straightforwardly reconstruct a global path by concatenating the local paths from block to block. Experiments on synthetic and real scenes have demonstrated the performance of our method, both for motion classification and principal paths recovery.
Reference: [17]
|