

Section: New Results
Robotic And Computational Models Of Human Development and Cognition
Computational Models Of Information-Seeking, Curiosity And Attention in Humans and Animals
Participants : Manuel Lopes, Pierre-Yves Oudeyer [correspondant] , Jacqueline Gottlieb, Adrien Baranes, William Schueller, Sebastien Forestier, Nabil Daddaouda, Nicholas Foley.
This project involves a collaboration between the Flowers team and the Cognitive Neuroscience Lab of J. Gottlieb at Columbia Univ. (NY, US) on the understanding and modeling of mechanisms of curiosity and attention that until now have been little explored in neuroscience, computer science and cognitive robotics. It is organized around the study of the hypothesis that information gain could generate intrinsic reward in the brain (living or artificial), controlling attention and exploration independently from material rewards. The project combines expertise about attention and exploration in the brain and a strong methodological framework for conducting experimentations with monkeys and humans (Gottlieb's lab) together with cognitive modeling of curiosity and learning in the Flowers team.
Such a collaboration paves the way towards a central objective, which is now a central strategic objective of the Flowers team: designing and conducting experiments in animals and humans informed by computational/mathematical theories of information seeking, and allowing to test the predictions of these computational theories.
Context
Curiosity can be understood as a family of mechanisms that evolved to allow agents to maximize their knowledge of the useful properties of the world - i.e., the regularities that exist in the world - using active, targeted investigations. In other words, we view curiosity as a decision process that maximizes learning (rather than minimizing uncertainty) and assigns value ("interest") to competing tasks based on their epistemic qualities - i.e., their estimated potential allow discovery and learning about the structure of the world.
Because a curiosity-based system acts in conditions of extreme uncertainty (when the distributions of events may be entirely unknown) there is in general no optimal solution to the question of which exploratory action to take [105] , [122] , [130] . Therefore we hypothesize that, rather than using a single optimization process as it has been the case in most previous theoretical work [90] , curiosity is comprised of a family of mechanisms that include simple heuristics related to novelty/surprise and measures of learning progress over longer time scales[16] [74] , [112] . These different components are related to the subject's epistemic state (knowledge and beliefs) and may be integrated with fluctuating weights that vary according to the task context. We will quantitatively characterize this dynamic, multi-dimensional system in the framework of Bayesian Reinforcement Learning, as described below.
Because of its reliance on epistemic currencies, curiosity is also very likely to be sensitive to individual differences in personality and cognitive functions. Humans show well-documented individual differences in curiosity and exploratory drives [103] , [129] , and rats show individual variation in learning styles and novelty seeking behaviors [88] , but the basis of these differences is not understood. We postulate that an important component of this variation is related to differences in working memory capacity and executive control which, by affecting the encoding and retention of information, will impact the individual's assessment of learning, novelty and surprise and ultimately, the value they place on these factors [127] , [136] , [70] , [140] . To start understanding these relationships, about which nothing is known, we will search for correlations between curiosity and measures of working memory and executive control in the population of children we test in our tasks, analyzed from the point of view of a computational model based on Bayesian reinforcement learning.
A final premise guiding our research is that essential elements of curiosity are shared by humans and non-human primates. Human beings have a superior capacity for abstract reasoning and building causal models, which is a prerequisite for sophisticated forms of curiosity such as scientific research. However, if the task is adequately simplified, essential elements of curiosity are also found in monkeys [103] , [100] and, with adequate characterization, this species can become a useful model system for understanding the neurophysiological mechanisms.
Objectives
Our studies have several highly innovative aspects, both with respect to curiosity and to the traditional research field of each member team.
-
Linking curiosity with quantitative theories of learning and decision making: While existing investigations examined curiosity in qualitative, descriptive terms, here we propose a novel approach that integrates quantitative behavioral and neuronal measures with computationally defined theories of Bayesian Reinforcement Learning and decision making.
-
Linking curiosity in children and monkeys: While existing investigations examined curiosity in humans, here we propose a novel line of research that coordinates its study in humans and non-human primates. This will address key open questions about differences in curiosity between species, and allow access to its cellular mechanisms.
-
Neurophysiology of intrinsic motivation: Whereas virtually all the animal studies of learning and decision making focus on operant tasks (where behavior is shaped by experimenter-determined primary rewards) our studies are among the very first to examine behaviors that are intrinsically motivated by the animals' own learning, beliefs or expectations.
-
Neurophysiology of learning and attention: While multiple experiments have explored the single-neuron basis of visual attention in monkeys, all of these studies focused on vision and eye movement control. Our studies are the first to examine the links between attention and learning, which are recognized in psychophysical studies but have been neglected in physiological investigations.
-
Computer science: biological basis for artificial exploration: While computer science has proposed and tested many algorithms that can guide intrinsically motivated exploration, our studies are the first to test the biological plausibility of these algorithms.
-
Developmental psychology: linking curiosity with development: While it has long been appreciated that children learn selectively from some sources but not others, there has been no systematic investigation of the factors that engender curiosity, or how they depend on cognitive traits.
Current results
During the first period of the associated team (2013-2015), we layed the operational foundations of the collaboration resulting in several milestone joint journal articles [110] , [90] , [84] [27] , new experimental paradigms for the study of curiosity, and organized a major scientific event: the first international interdisciplinary symposium on information seeking, curiosity and attention (web: https://openlab-flowers.inria.fr/t/first-interdisciplinary-symposium-on-information-seeking-curiosity-and-attention/21 ).
In particular, new results in 2015 include:
Eye movements reveal epistemic curiosity in human observers
Saccadic (rapid) eye movements are primary means by which humans and non-human primates sample visual information. However, while saccadic decisions are intensively investigated in instrumental contexts where saccades guide subsequent actions, it is largely unknown how they may be influenced by curiosity – the intrinsic desire to learn. While saccades are sensitive to visual novelty and visual surprise, no study has examined their relation to epistemic curiosity – interest in symbolic, semantic information. To investigate this question, we tracked the eye movements of human observers while they read trivia questions and, after a brief delay, were visually given the answer. We showed that higher curiosity was associated with earlier anticipatory orienting of gaze toward the answer location without changes in other metrics of saccades or fixations, and that these influences were distinct from those produced by variations in confidence and surprise. Across subjects, the enhancement of anticipatory gaze was correlated with measures of trait curiosity from personality questionnaires. Finally, a machine learning algorithm could predict curiosity in a cross-subject manner, relying primarily on statistical features of the gaze position before the answer onset and independently of covariations in confidence or surprise, suggesting potential practical applications for educational technologies, recommender systems and research in cognitive sciences. We published these results in [27] , providing full access to the annotated database allowing readers to reproduce the results. Epistemic curiosity produces specific effects on oculomotor anticipation that can be used to read out curiosity states.
Intrinsically motivated oculomotor exploration guided by uncertainty reduction and conditioned reinforcement in non-human primates
Intelligent animals have a high degree of curiosity – the intrinsic desire to know – but the mechanisms of curiosity are poorly understood. A key open question pertains to the internal valuation systems that drive curiosity. What are the cognitive and emotional factors that motivate animals to seek information when this is not reinforced by instrumental rewards? Using a novel oculomotor paradigm, combined with reinforcement learning (RL) simulations, we show that monkeys are intrinsically motivated to search for and look at reward-predictive cues, and that their intrinsic motivation is shaped by a desire to reduce uncertainty, a desire to obtain conditioned reinforcement from positive cues, and individual variations in decision strategy and the cognitive costs of acquiring information. The results suggest that free-viewing oculomotor behavior reveals cognitive and emotional factors underlying the curiosity driven sampling of information. [84]
Computational Models Of Speech Development: the Roles of Active Learning, Curiosity and Self-Organization
Participants : Pierre-Yves Oudeyer [correspondant] , Clement Moulin-Frier, Sébastien Forestier.
Special issue on the cognitive nature of speech sounds
Together with Jean-Luc Schwartz and Kenneth de Jong, Flowers members Clément Moulin-Frier and Pierre-Yves Oudeyer guest-edited a milestone special issue of the Journal of Phonetics focusing on theories of the cognitive nature of speech sounds, and with a special emphasis on presenting and analyzing a rich series of computational models of speech evolution and acquisition developped in the past years internationally, including models developped by the guest-editors. The editorial of this special issue was published in [35] and the special issue is accessible at: http://www.sciencedirect.com/science/journal/00954470/53 .
The COSMO model: A Bayesian modeling framework for studying speech communication and the emergence of phonological systems
(Note: this model was developped while C. Moulin-Frier was at GIPSA Lab, and writing was partly achieved while he was at Inria). While the origin of language remains a somewhat mysterious process, understanding how human language takes specific forms appears to be accessible by the experimental method. Languages, despite their wide variety, display obvious regularities. In this paper, we attempt to derive some properties of phonological systems (the sound systems for human languages) from speech communication principles. The article [33] introduces a model of the cognitive architecture of a communicating agent, called COSMO (for “Communicating about Objects using Sensory–Motor Operations') that allows a probabilistic expression of the main theoretical trends found in the speech production and perception literature. This enables a computational comparison of these theoretical trends, which helps us to identify the conditions that favor the emergence of linguistic codes. It presents realistic simulations of phonological system emergence showing that COSMO is able to predict the main regularities in vowel, stop consonant and syllable systems in human languages.
The role of self-organization, motivation and curiosity in speech development and evolution
In the article [34] , Oudeyer discusses open scientific challenges for understanding development and evolution of speech forms. Based on the analysis of mathematical models of the origins of speech forms, with a focus on their assumptions, the article studies the fundamental question of how speech can be formed out of non-speech, at both developmental and evolutionary scales. In particular, it emphasizes the importance of embodied self-organization, as well as the role of mechanisms of motivation and active curiosity-driven exploration in speech formation. Finally, it discusses an evolutionary-developmental perspective of the origins of speech.
Robotic models of the joint development of speech and tool use
A scientific challenge in developmental and social robotics is to model how autonomous organisms can develop and learn open repertoires of skills in high-dimensional sensorimotor spaces, given limited resources of time and energy. This challenge is important both from the fundamental and application perspectives. First, recent work in robotic modeling of development has shown that it could make decisive contributions to improve our understanding of development in human children, within cognitive sciences [90] . Second, these models are key for enabling future robots to learn new skills through lifelong natural interaction with human users, for example in assistive robotics [124] .
In recent years, two strands of work have shown significant advances in the scientific community. On the one hand, algorithmic models of active learning and imitation learning combined with adequately designed properties of robotic bodies have allowed robots to learn how to control an initially unknown high-dimensional body (for example locomotion with a soft material body [73] ). On the other hand, other algorithmic models have shown how several social learning mechanisms could allow robots to acquire elements of speech and language [79] , allowing them to interact with humans. Yet, these two strands of models have so far mostly remained disconnected, where models of sensorimotor learning were too “low-level” to reach capabilities for language, and models of language acquisition assumed strong language specific machinery limiting their flexibility. Preliminary work has been showing that strong connections are underlying mechanisms of hierarchical sensorimotor learning, artificial curiosity, and language acquisition [125] .
Recent robotic modeling work in this direction has shown how mechanisms of active curiosity-driven learning could progressively self-organize developmental stages of increasing complexity in vocal skills sharing many properties with the vocal development of infants [113] . Interestingly, these mechanisms were shown to be exactly the same as those that can allow a robot to discover other parts of its body, and how to interact with external physical objects [120] .
In such current models, the vocal agents do not associate sounds to meaning, and do not link vocal production to other forms of action. In other models of language acquisition, one assumes that vocal production is mastered, and hand code the meta-knowledge that sounds should be associated to referents or actions [79] . But understanding what kind of algorithmic mechanisms can explain the smooth transition between the learning of vocal sound production and their use as tools to affect the world is still largely an open question.
The goal of this work is to elaborate and study computational models of curiosity-driven learning that allow flexible learning of skill hierarchies, in particular for learning how to use tools and how to engage in social interaction, following those presented in [120] , [73] , [118] , [113] . The aim is to make steps towards addressing the fundamental question of how speech communication is acquired through embodied interaction, and how it is linked to tool discovery and learning.
A first question that we study in this work is the type of mechanisms that could be used for hierarchical skill learning allowing to manage new task spaces and new action spaces, where the action and task spaces initially given to the robot are continuous and high-dimensional and can be encapsulated as primitive actions to affect newly learnt task spaces.
We presented preliminary results on that question in a poster session [89] of the ICDL/Epirob conference in Providence, RI, USA in August 2015. In this work, we rely more specifically on the R-IAC and SAGG-RIAC series of architectures developed in the Flowers team and we develop different ways to extend those architectures to the learning of several task spaces that can be explored in a hierarchical manner. We describe an interactive task to evaluate different hierarchical learning mechanisms, where a robot has to explore its motor space in order to push an object to different locations. The task can be decomposed into two subtasks where the robot can first explore how to make movements with its hand and then integrate this skill to explore the task of pushing an object.
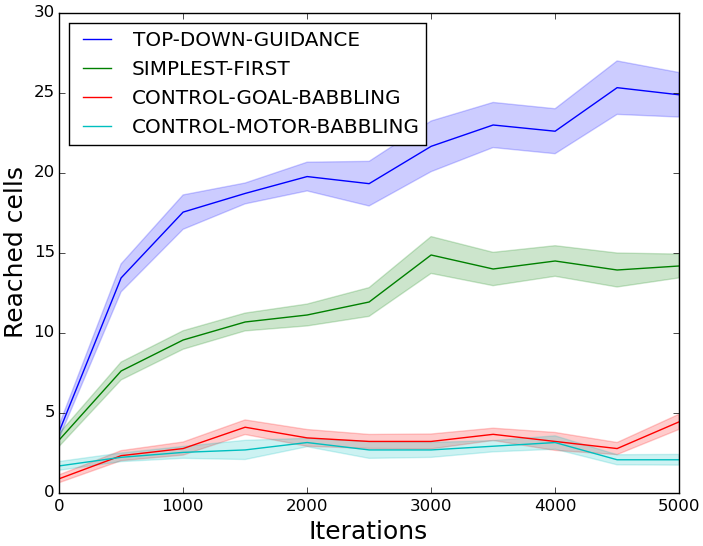
In the Simplest First strategy, the agent explores successively but with a fixed curriculum the different tasks to learn in the good order: from the simplest one (learning hand movements given motor parameters) to the more complex one (pushing a block with hand movements) that need knowledge about the simpler task to be learned.
In the Top-Down Guidance strategy, the module learning the more complex task (pushing a block with hand movements) gives goals (hand movements) to be reached by the lower-level module (learning hand movements given motor parameters) that will explore for a while to reach that goal before switching to a new given goal.
We also compare our architectures to the control ones where the robot learns directly the not decomposed task, with a competence-based intrinsic motivation (goal babbling) or a fully random motor babbling.
The results show a better exploration for the Top-Down Guidance than the Simplest First hierarchical exploration strategy, and that learning intermediate representations is beneficial in this setup.
|
Learning in Adult-Child and Human-Robot Interaction
Participants : Anna-Lisa Vollmer [correspondant] , Pierre-Yves Oudeyer.
Learning in Adult-Child and Human-Robot Interaction
The Change of `Motionese' Parameters Depending on Children's Age.
Two adult-child interaction studies were analyzed with the focus on the parental teaching behavior, in particular on motionese parameters (modifications of child-directed movement). In the first cross-sectional study, parental action demonstrations to three groups of 8–11, 12– 23 and 24–30 month-olds ( parents) were investigated. The youngest group of participants was investigated longitudinally in the second study ( parents). Together the results suggest that some motionese parameters (motion pauses, velocity, acceleration) persist over different ages while other parameters (action length, roundness and pace) occur predominantly in the younger group and seem to be primarily used to attract infants' attention on the basis of movement. In contrast, parameters appearing to be more in charge of structuring the action by organizing it in motion pauses seem to persist. We discuss the results in terms of facilitative vs. pedagogical learning in a paper currently under review for the Journal of Experimental Child Psychology.
An Alternative to Mapping a Word onto a Concept in Language Acquisition: Pragmatic Frames
According to the mapping metaphor, for a child to learn a word, s/he has to map a word onto a concept of an object/event. We are not convinced that associations can explain word learning, because even though children’s attention is on the objects, they do not necessarily remember the connection of the word with the referent. In this theoretical paper, we propose an alternative to the mapping process that is classically assumed as a mechanism for word learning. Our main point holds that word learning is a task, in which children accomplish a goal in cooperation with a partner. In our approach, we follow Bruner’s (1983) idea and further specify pragmatic frames as learning units that drive language acquisition and cognitive development. These units consist of a sequence of language and actions that are co-constructed with a partner to achieve a joint goal. We elaborate on this alternative, offer some initial parametrizations of the concept and embed it in the current language learning approaches in a paper currently under review for Frontiers in Psychology, section Cognitive Science.
Meta-Analysis of Pragmatic Frames in Human-Robot Interaction for Learning and Teaching: State-of-the-Art and Perspectives
One of the big challenges in robotics today is to learn from inexperienced human users. Despite tremendous research efforts and advances in human-robot interaction (HRI) and robot learning in the past decades, learning interactions with robots remain brittle and rigidly organized, and often are limited to learning only one single task. In this work, we applied the concept of pragmatic frames known from developmental research in humans in a meta-analysis of current approaches on robot learning. This concept offers a new research perspective in HRI as multiple flexible interaction protocols can be used and learned to teach/learn multiple kinds of skills in long-term recurring social interaction. This perspective, thus, emphasizes teaching as a collaborative achievement of teacher and learner. Our meta-analysis focuses on robot learning from a human teacher with respect to the pragmatic frames they (implicitly) use. We show that while the current approaches offer a variety of different learning and teaching behavior, they all employ highly pre-structured, hard-coded pragmatic frames. Compared to natural human-human interaction, interactions are lacking flexibility and expressiveness, and mostly are hardly viable for being realized with truly naive and uninstructed users. We elaborated an outlook on the future research direction with its relevant key challenges that need to be solved for leveraging pragmatic frames for robot learning. These results have been submitted to the Frontiers in Neurorobotics Journal.
Alignment to the Actions of a Robot
Alignment is a phenomenon observed in human conversation: Dialog partners' behavior converges in many respects. Such alignment has been proposed to be automatic and the basis for communicating successfully. Recent research on human-computer dialog promotes a mediated communicative design account of alignment according to which the extent of alignment is influenced by interlocutors' beliefs about each other. Our work aims at adding to these findings in two ways. a) Our work investigates alignment of manual actions, instead of lexical choice. b) Participants interact with the iCub humanoid robot, instead of an artificial computer dialog system. Our results confirm that alignment also takes place in the domain of actions. We were not able to replicate the results of the original study in general in this setting, but in accordance with its findings, participants with a high questionnaire score for emotional stability and participants who are familiar with robots align their actions more to a robot they believe to be basic than to one they believe to be advanced. Regarding alignment over the course of an interaction, the extent of alignment seems to remain constant, when participants believe the robot to be advanced, but it increases over time, when participants believe the robot to be a basic version. These results were published in [38] .
Models of Multimodal Concept Acquisition with Non-Negative Matrix Factorization
Participants : Pierre-Yves Oudeyer, Olivier Mangin [correspondant] , David Filliat, Louis Ten Bosch.
In the article [32] we introduced MCA-NMF, a computational model of the acquisition of multi-modal concepts by an agent grounded in its environment. More precisely our model finds patterns in multimodal sensor input that characterize associations across modalities (speech utterances, images and motion). We propose this computational model as an answer to the question of how some class of concepts can be learnt. In addition, the model provides a way of defining such a class of plausibly learnable concepts. We detail why the multimodal nature of perception is essential to reduce the ambiguity of learnt concepts as well as to communicate about them through speech. We then present a set of experiments that demonstrate the learning of such concepts from real non-symbolic data consisting of speech sounds, images, and motions. Finally we consider structure in perceptual signals and demonstrate that a detailed knowledge of this structure, named compositional understanding can emerge from, instead of being a prerequisite of, global understanding. An open-source implementation of the MCA-NMF learner as well as scripts and associated experimental data to reproduce the experiments are publicly available.
The python code and datasets allowing to reproduce these experiments and results are available at: https://github.com/omangin/multimodal .
Models of Self-organization of lexical conventions: the role of Active Learning in Naming Games
Participants : William Schueller [correspondant] , Pierre-Yves Oudeyer.
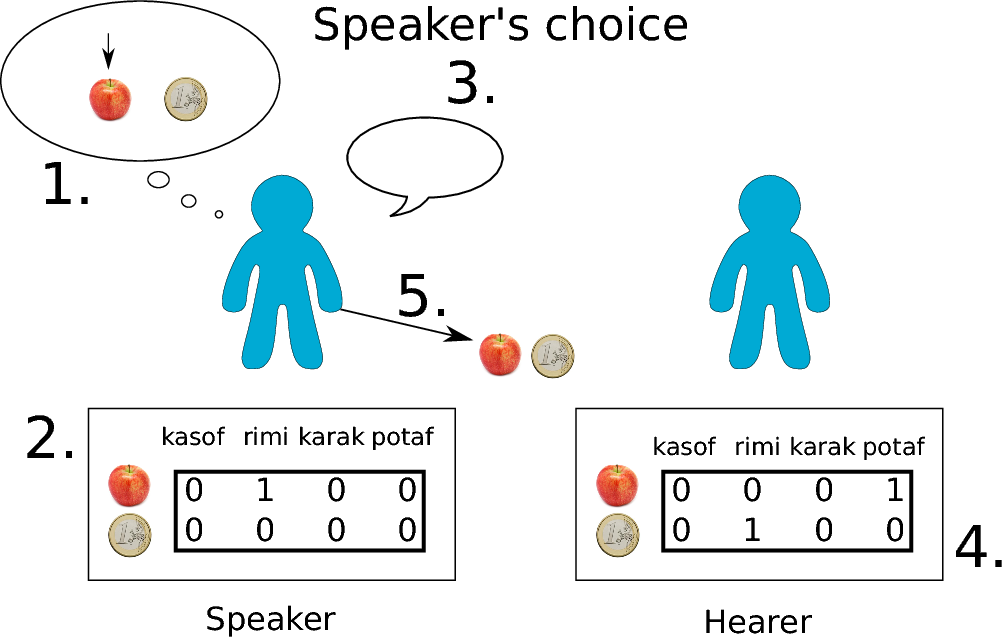
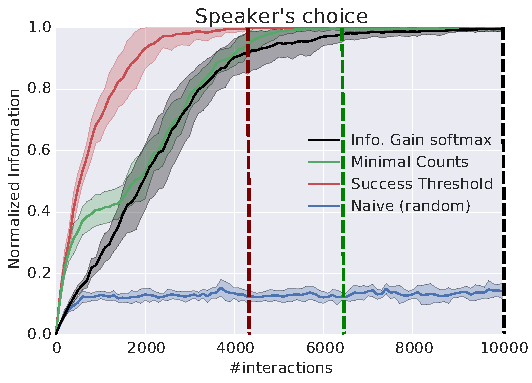
Our work focuses on the Naming Games framework [135] , meant to simulate lexicon evolution in a population from interactions at the individual level. A quite diverse subset of the possible scenarios and algorithms has already been studied, and those do lead to the self-organization of a shared lexicon (understood as associations between meanings and words). However, high values for some parameters (population size, number of possible words and/or meanings that can be refered to) can lead to really slow dynamics. Following the introductory work done in [119] , we introduced a new measure of vocabulary evolution based on information theory, as well as various active learning mechanisms in the Naming Games framework allowing the agents to choose what they talk about according to their past. We showed that it improves convergence dynamics in the studied scenarios and parameter ranges. Active learning mechanisms use the confidence an agent has on its own vocabulary (is it already widely used in the population or not?) to choose between exploring new associations (growing vocabulary) or strengthening already existing ones (spreading its own associations to other agents). This was presented at the ICDL/Epirob conference in Providence, RI, USA in August 2015 [59] .
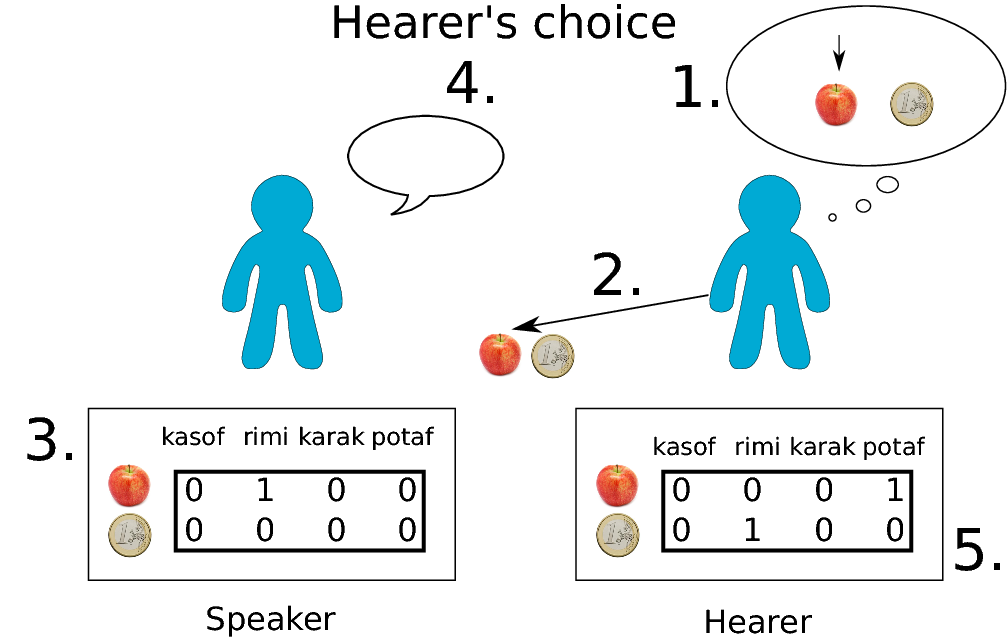
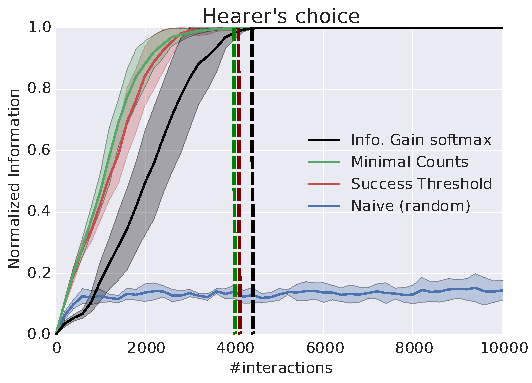
A follow-up to this work consisted of changing slightly the base algorithms, allowing agents to select what they want the others to talk about instead of selecting what they would talk about (hearer's choice scenario, the original one being speaker's choice scenario). In the class of algorithms used, with active learning, it leads to faster convergence, with increased robustness to change in parameter values.
|
|
All the simulations can be easily rerun using the provided code and explanatory notebooks on https://github.com/flowersteam/naminggamesal .