Section: New Software and Platforms
Platforms
Platform: Collaborative assemblies with Baxter
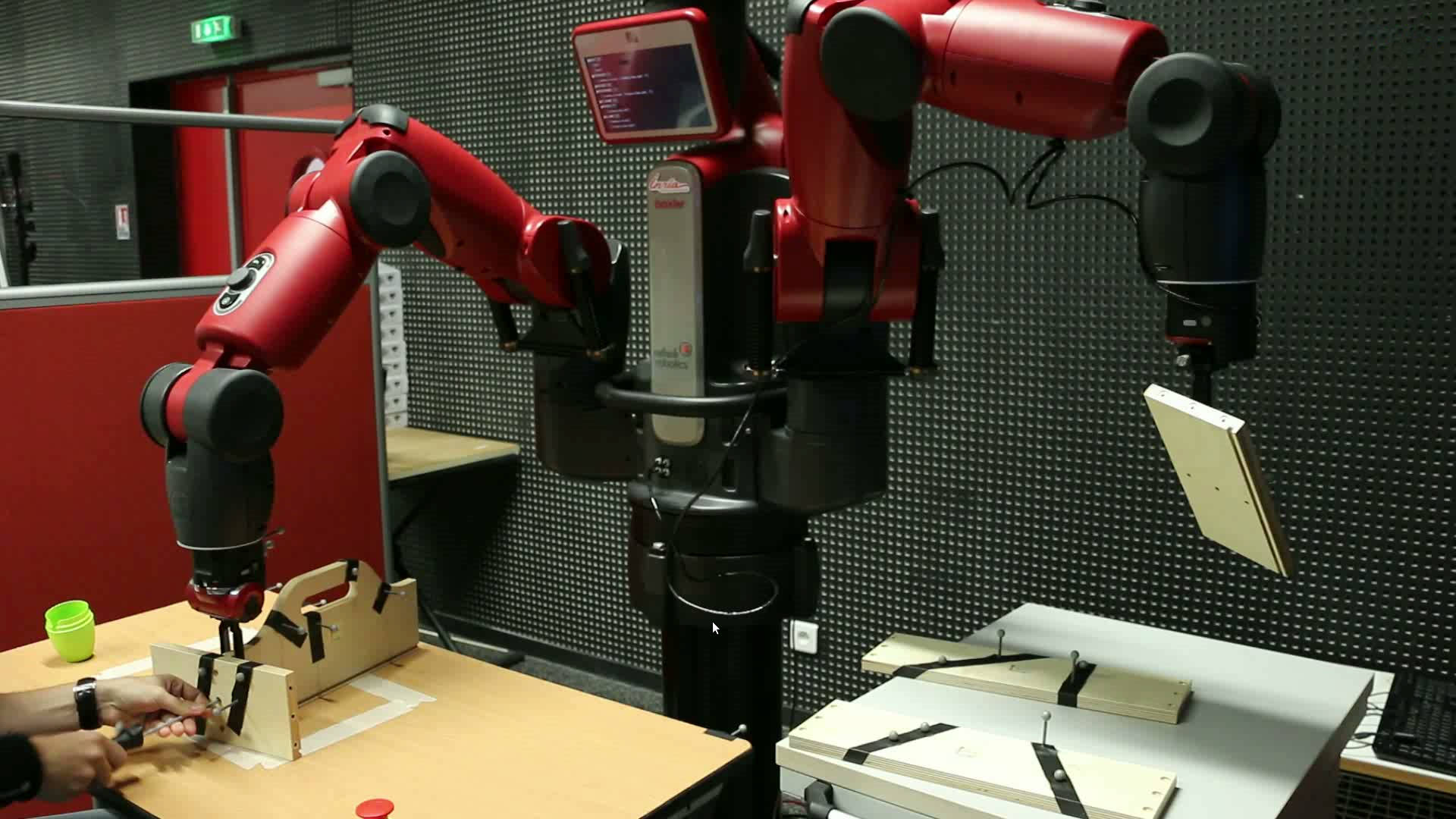
Functional Description This platform is a set of software components and hardware robotic components designed as an experimental setup for performing scientific experiments with the Baxter robot illustrating human-robot collaboration. It comes with a set of capabilities (pick objects, handover, hold objects in place, ...) and physical objects (screwdriver, landmarks, camera mounts, ...) created on purpose or hacked to serve these capabilities. The initial capabilities focus on industrial activities and allow the robot to provide assistance to workers in manufacturing factories for their daily tasks (pieces fetching, screwing, assembly, ...). We simulated an industrial environment with a trolley acting as a feeder where all spare parts are initially located, a workspace for the worker and 7 spare parts composing a wooden toolbox that users and robot will handle for their collaborative tasks. This industrial environment is the one of the 3rd hand project, but the platform and its capabilities will progessively be improved and enriched to be used for other projects. The picture 7 illustrates the experimental setup.