Section: New Software and Platforms
Humanoid robot platform
Participants : Giovanni Claudio, Fabien Spindler [correspondant] .
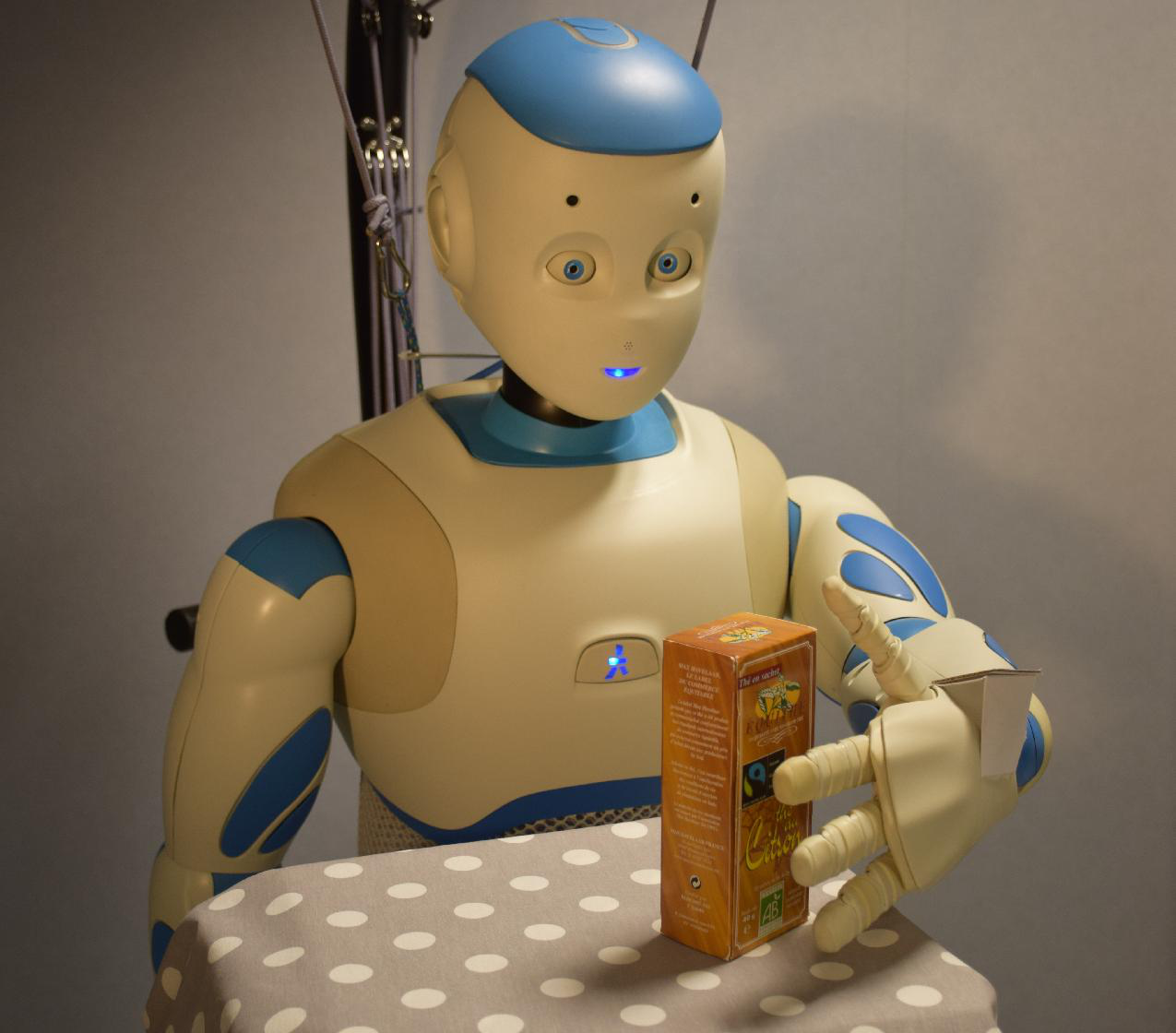
Romeo is a humanoid robot from Aldebaran Robotics which is intended to be a genuine personal assistant and companion. For the moment only the upper part of the body (trunk, arms, neck, head, eyes) is working. This research platform is used to validate our researches in visual servoing and visual tracking. We continue to improve the work initiated last year to grasp a box and deliver it to a human introducing especially joint limits avoidance (see Fig. 6 ). We started also to work on a visual servoing framework able to control both arms to manipulate an object using only vision.
This year one paper encloses experimental results obtained with this platform [54] .