Section: New Software and Platforms
Medical robotics platform
Participants : Fabien Spindler [correspondant] , Alexandre Krupa.
This testbed is of primary interest for researches and experiments concerning ultrasound visual servoing applied to probe positioning, soft tissue tracking or robotic needle insertion tasks described in Section 7.6 .
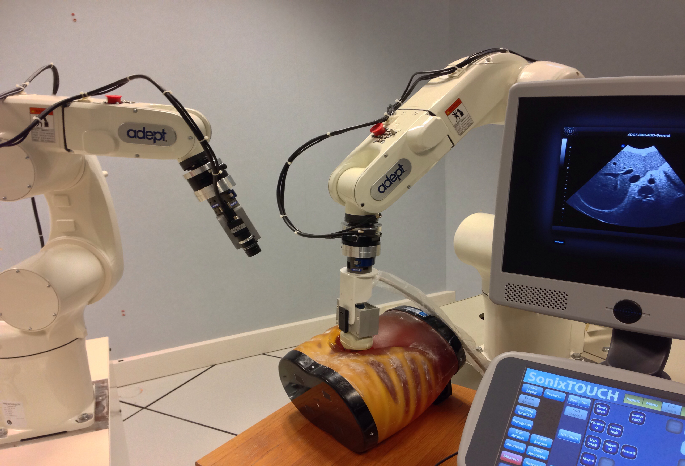
This platform is composed by two Adept Viper six degrees of freedom arms (see Fig. 5 .a). Ultrasound probes connected either to a SonoSite 180 Plus or an Ultrasonix SonixTouch imaging system can be mounted on a force torque sensor attached to each robot end-effector.
We designed an experimental setup to test an autonomous robotic needle insertion method based on visual servoing 7.6.2 . The experimental setup is composed with a gelatin phantom simulating soft tissues, a flexible biopsy needle actuated by an Adept Viper arm and a 3D ultrasound probe held by the second Adept Viper arm (see Fig. 5 .b).
This year, 5 papers enclose experimental results obtained with this platform [49] [48] [47] [33] [32] .
|