Section:
New Results
An Efficient Volumetric Framework for Shape Tracking
Recovering 3D shape motion using visual information is an important
problem with many applications in computer vision and computer
graphics, among other domains. Most existing approaches rely on
surface-based strategies, where surface models are fit to visual
surface observations. While numerically plausible, this paradigm
ignores the fact that the observed surfaces often delimit volumetric
shapes, for which deformations are constrained by the volume inside
the shape. Consequently, surface-based strategies can fail when the
observations define several feasible surfaces, whereas volumetric
considerations are more restrictive with respect to the admissible
solutions. In this work, we investigate a novel volumetric shape
parametrization to track shapes over temporal sequences. In
constrast to Eulerian grid discretizations of the observation space,
such as voxels, we consider general shape tesselations yielding more
convenient cell decompositions, in particular the Centroidal Voronoi
Tesselation. With this shape representation, we devise a tracking
method that exploits volumetric information, both for the data term
evaluating observation conformity, and for expressing deformation
constraints that enforce prior assumptions on motion. Experiments on
several datasets demonstrate similar or improved precisions over
state-of-the-art methods, as well as improved robustness, a critical
issue when tracking sequentially over time frames. This work was
accepted as oral at CVPR 2015 (less than 3% acceptance
rate) [8] .
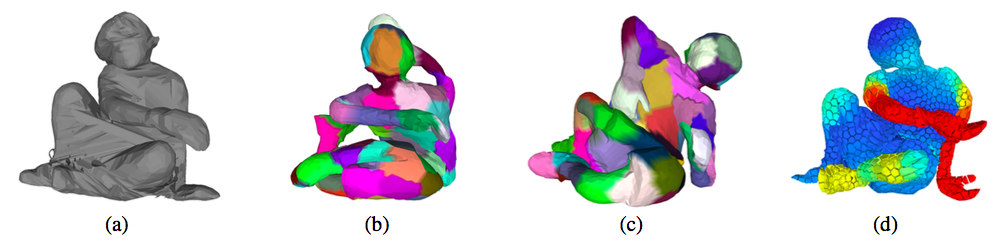
Figure
4. Frames of the goalkeeper dataset acquired on the
Kinovis platform. (a) Visual hull input. (b) Tracking result of
Cagniart et al. 2010. (c) Allain et al. 2014. (d) This method [8] . Note the improved angular shapes and the improved robustness.
|
|