Section: New Results
Augmented Reality for Hepatic Surgery
Participants : Rosalie Plantefève, Bruno Marques, Frederick Roy, Nazim Haouchine, Igor Peterlik, Stéphane Cotin.
Liver cancer is the 2nd most common cause of cancer death worldwide, with more than 745,000 deaths from liver cancer in 2012. When including deaths from liver cirrhosis, the toll reaches nearly 2 million people worldwide. Today, surgical tumor ablation remains the best treatment for liver cancer.To localize the hepatic tumors and to define the resection planes, clinicians rely on pre-operative medical images (obtained with computed tomography scanner or magnetic resonance imaging). However, the liver lesions and vascular system are difficult to localize during surgery. This may lead to incomplete tumor resection or haemorrhage.
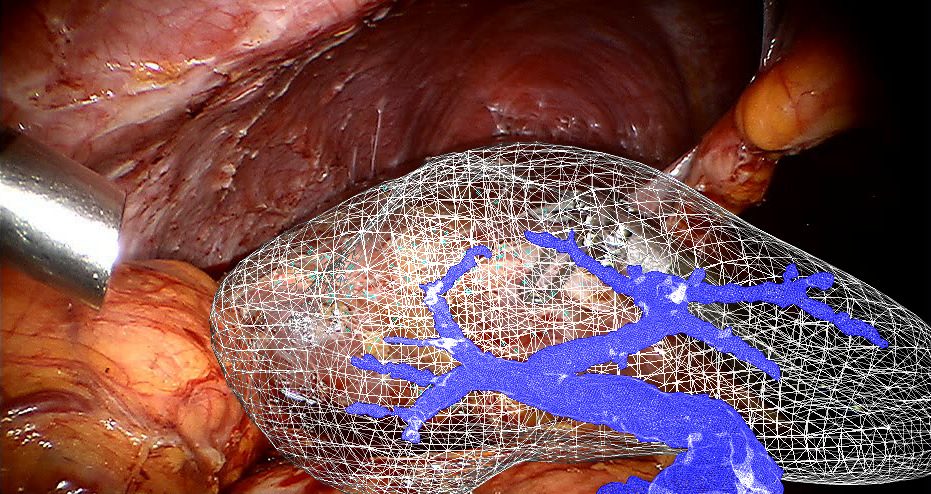
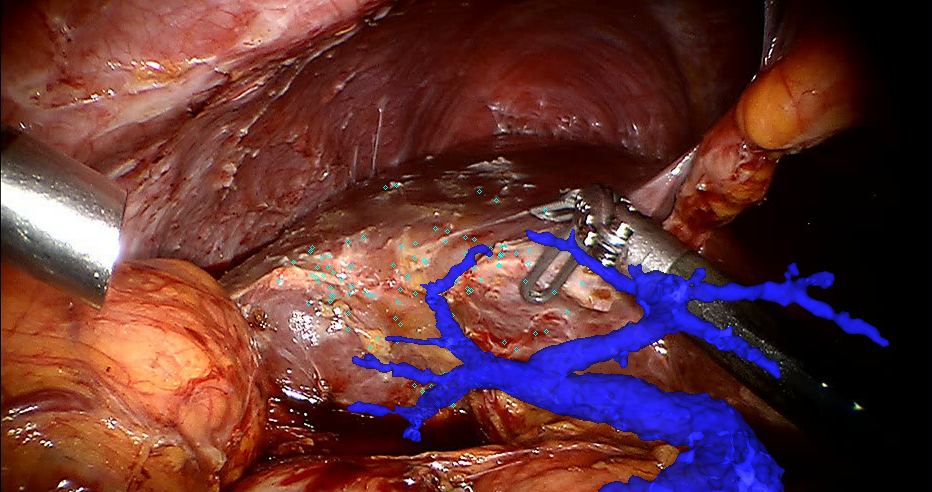
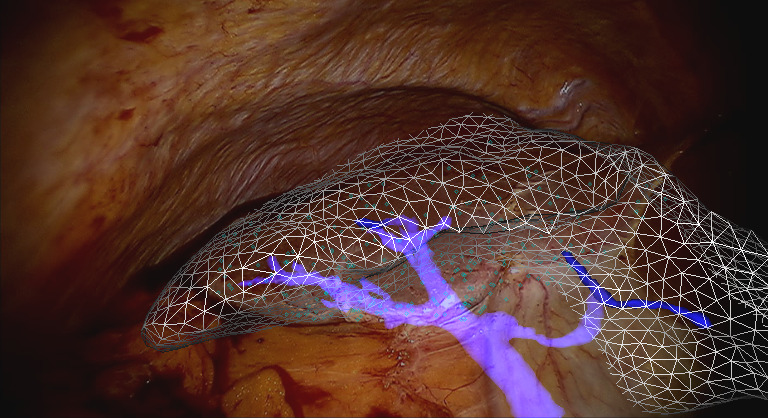
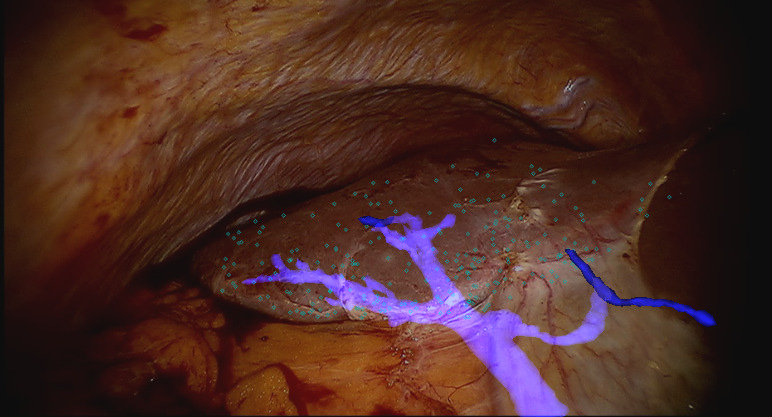
We provide surgeons with an augmented view of the liver and its internal structures during surgery to help them to optimally resect the tumors while limiting the risk of vascular lesion. Therefore, an elastic registration method to align the pre-operative and intra-operative data has been developed [26]. This method, which uses a biomechanical model and anatomical landmarks, was designed to limit its impact on the clinical workflow and reaches a registration accuracy below the resection margin even when the liver is strongly deformed between its pre-operative and intra-operative state. This registration algorithm has been integrated into a software, SOFA-OR, to conduct the first clinical tests.