

Section: New Results
Augmented Reality in Surgical Navigation
Organ Pose Estimation for Augmented Reality in Hepatic Surgery
Participants: Y. Adagolodjo, R. Trivisonne, H. Courtecuisse, S. Cotin
A contribution focusing on intra-operative organ pose estimation was publihsed at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017) [19]. A novel method for semi-automatic registration of 3D deformable models using 2D shape outlines (silhouettes) extracted from a monocular camera view was introduced. The proposed framework is based on the combination of a biomechanical model of the organ with a set of projective constraints influencing the deformation of the model. To enforce convergence towards a global minimum for this ill-posed problem we interactively provide a rough (rigid) estimation of the pose. We show that our approach allows for the estimation of the non-rigid 3D pose while relying only on 2D information. The method is evaluated experimentally on a soft silicone gel model of a liver, as well as on real surgical data, providing augmented reality of the liver and the kidney using a monocular laparoscopic camera. Results show that the final elastic registration can be obtained in just a few seconds, thus remaining compatible with clinical constraints. We also evaluate the sensitivity of our approach according to both the initial alignment of the model and the silhouette length and shape.
|
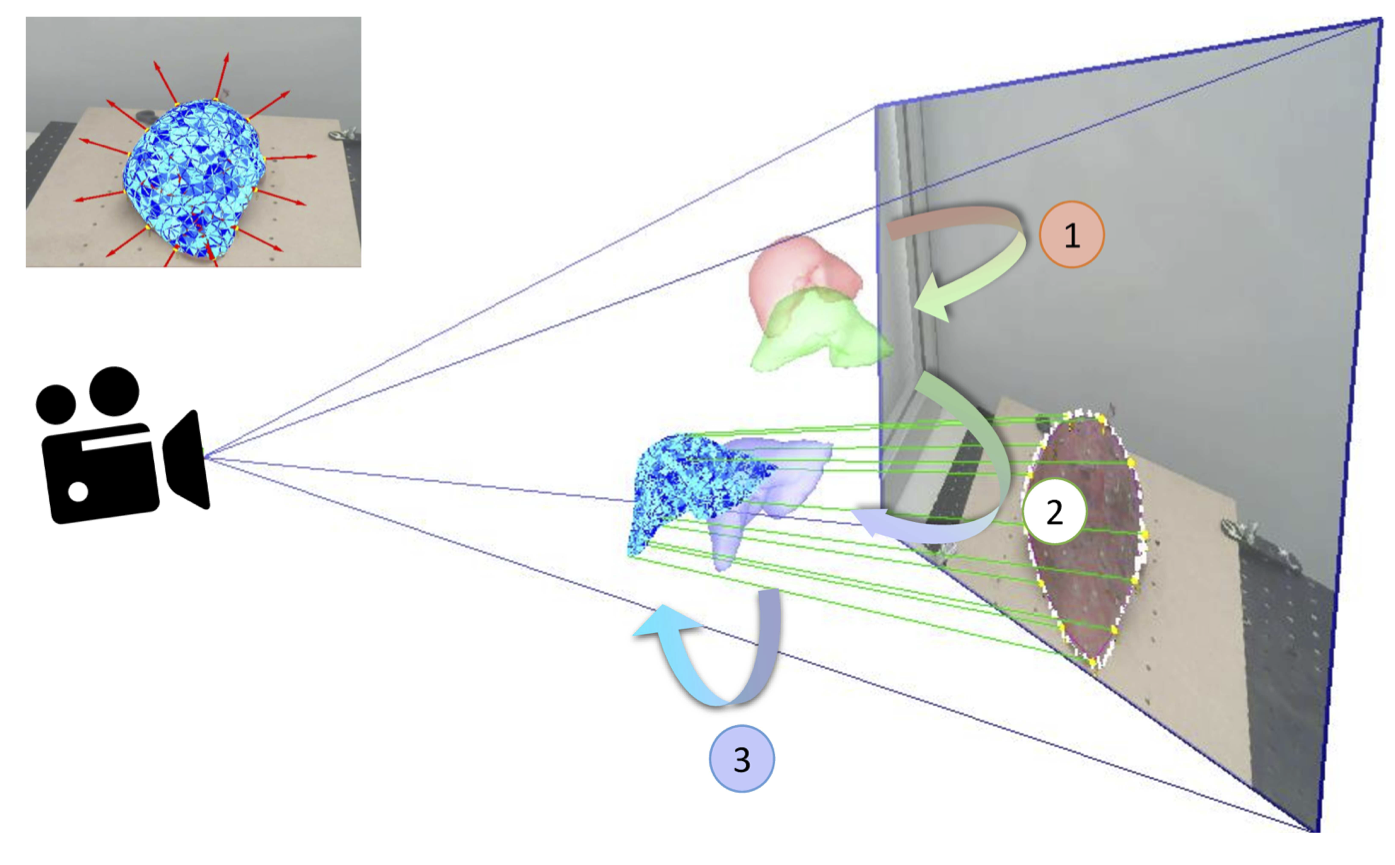
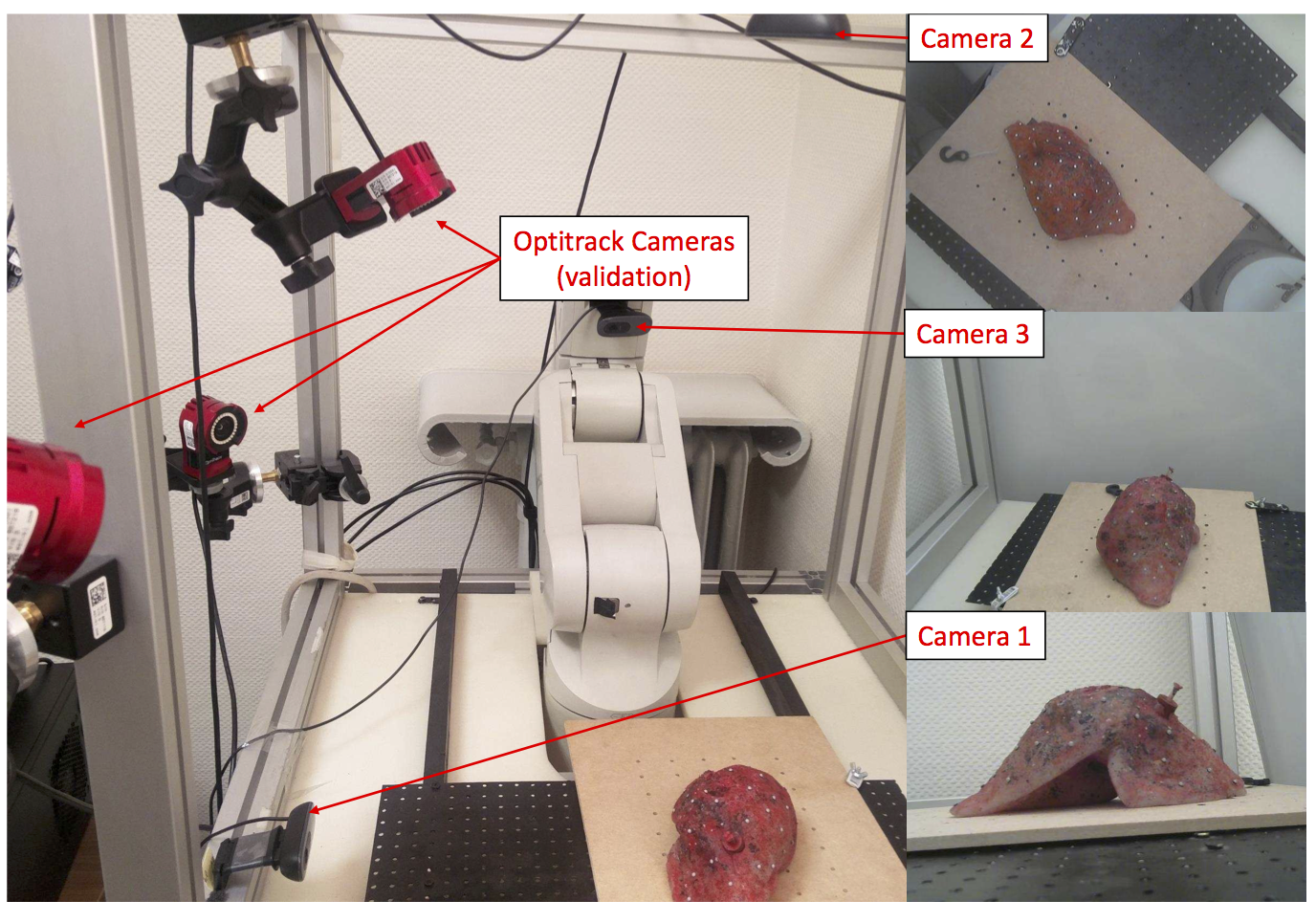
Image-driven Stochastic Estimation of Boundary Conditions
Participants: N. Haouchine, I. Peterlik, S. Cotin
A novel method was proposed in the context of image-driven stochastic simulation employed in the intra-operative navigation [25]. In the proposed approach, the boundary conditions are modeled as stochastic parameters. The method employs the reduced-order unscented Kalman filter to transform in real-time the probability distributions of the parameters, given observations extracted from intra-operative images. The method is evaluated using synthetic, phantom and real data acquired in vivo on a porcine liver. A quantitative assessment is presented and it is shown that the method significantly increases the predictive power of the biomechanical model employed by a framework implemented the augmented reality for surgical navigation.