Section: New Results
Real-time simulation of stimulation systems
Participant : Daniel Simon.
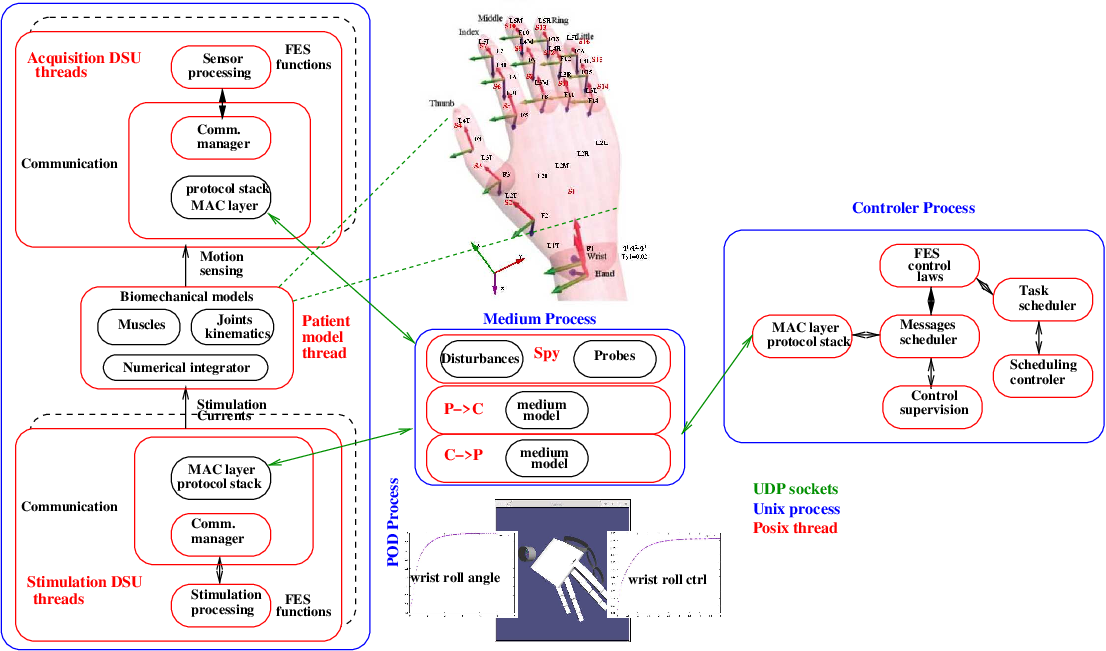
RT-Stim (Real-time FES simulation) is a C/C++ framework able to carry out realistic simulations of a fully featured functional electro-stimulation system. It allows for the temporally consistent co-simulation of both the continuous model of skeletal joints and muscles on one hand, and of numerical resources such as control tasks, schedulers and communication protocols on the other hand (Figure 13). Initial software-in-the-loop simulations can be seamlessly extended towards hardware-in-the-loop simulation by a progressive integration of real components such as a Raspberry portable control board or gateways towards Vivaltis stimulators and HiKoB sensors.
It is intended to be a support for the design and implementation of safe stimulation feedback controllers in the team. Hence, the simulation software is designed around the bio-mechanical models of joints and muscles excited using electro-stimulation developed in the Demar and Camin teams during the past years. To cope with the objectives of the team which targets the restoration of grasping for tetraplegia, a model of a human hand, currently using 23 joints and 23 muscles, has been integrated. It is expected to be a central tool for the Agilis project starting in 2019.