

Section: New Software and Platforms
PyPot
Scientific Description: Pypot is a framework developed to make it easy and fast to control custom robots based on Dynamixel motors. This framework provides different levels of abstraction corresponding to different types of use. Pypot can be used to:
-
define the structure of a custom robot and control it through high-level commands,
-
define primitives and easily combine them to create complex behavior.
Pypot is part of the Poppy project. It is the core library used by the Poppy robots. This abstraction layer allows to seamlessly switch from a given Poppy robot to another. It also provides a common set of tools, such as forward and inverse kinematics, simple computer vision, recording and replaying moves, or easy access to the autonomous exploration library Explauto.
To extend pypot application domains and connection to outside world, it also provides an HTTP API. On top of providing an easy way to connect to smart sensors or connected devices, it is notably used to connect to Snap!, a variant of the well-known Scratch visual programming language.
Functional Description: Pypot is entirely written in Python to allow for fast development, easy deployment and quick scripting by non-expert developers. It can also benefit from the scientific and machine learning libraries existing in Python. The serial communication is handled through the standard library and offers high performance (10ms sensorimotor loop) for common Poppy uses. It is cross-platform and has been tested on Linux, Windows and Mac OS.
Pypot is also compatible with the V-REP simulator. This allows the transparent switch from a real robot to its simulated equivalent with a single code base.
Finally, it has been developed to be easily and quickly extended for other types of motors and sensors.
It works with Python 2.7 or Python 3.3 or later, and has also been adapted to the Raspberry Pi board.
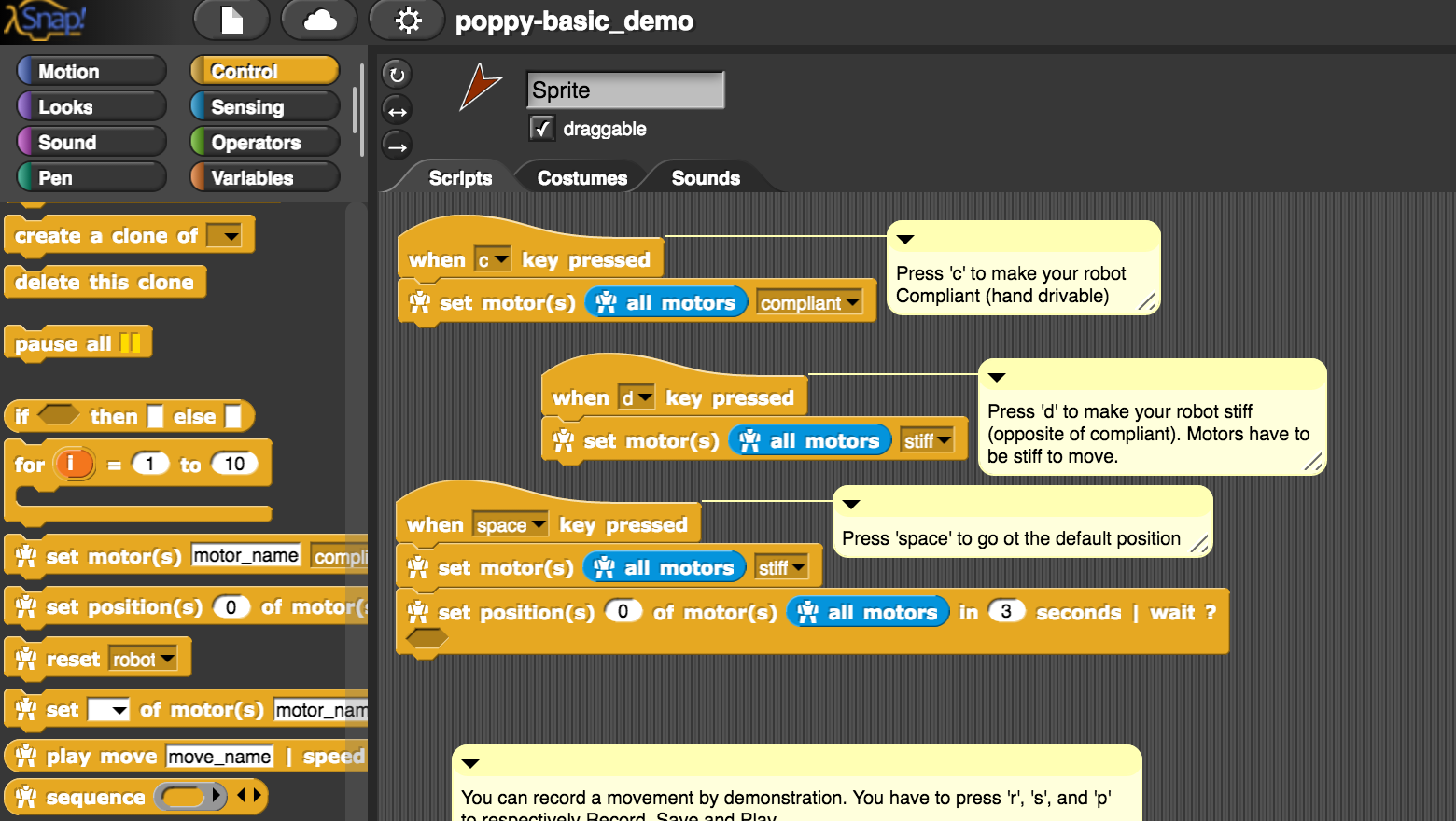
Pypot has been connected to Snap!, a variant of the famous Scratch visual language, developed to teach computer science to children. It is based on a drag-and-drop blocks interface to write scripts by assembling those blocks.
Thanks to the Snap! HTTP block, a connection can be made to pypot allowing users to directly control robots through their visual interfaces. A set of dedicated Snap! blocks have been designed, such as *set motor position* or *get motor temperature*. Thanks to the Snap! HTTP block, users can control robots through this visual interfaces connecting to Pypot. A set of dedicated Snap! blocks has been designed, such as *set motor position* or *get motor temperature*.

Snap! is also used as a tool to program the robot by demonstration. Using the *record* and *play* blocks, users can easily trigger kinesthetic recording of the whole robot or only a specific subpart, such as an arm. These records can then be played or "mixed" - either played in sequence or simultaneously - with other recordings to compose complex choreographies. The moves are encoded as a model of mixture of gaussians (GMM) which allows the definition of clean mathematical operators for combining them.
This recording tool has been developed and used in collaboration with artists who show interest in the concept of robotic moves.
