Section: New Results
A Unified Bayesian and Physics-Based Approach for Non-rigid 3D Shape Reconstruction from 2D Images
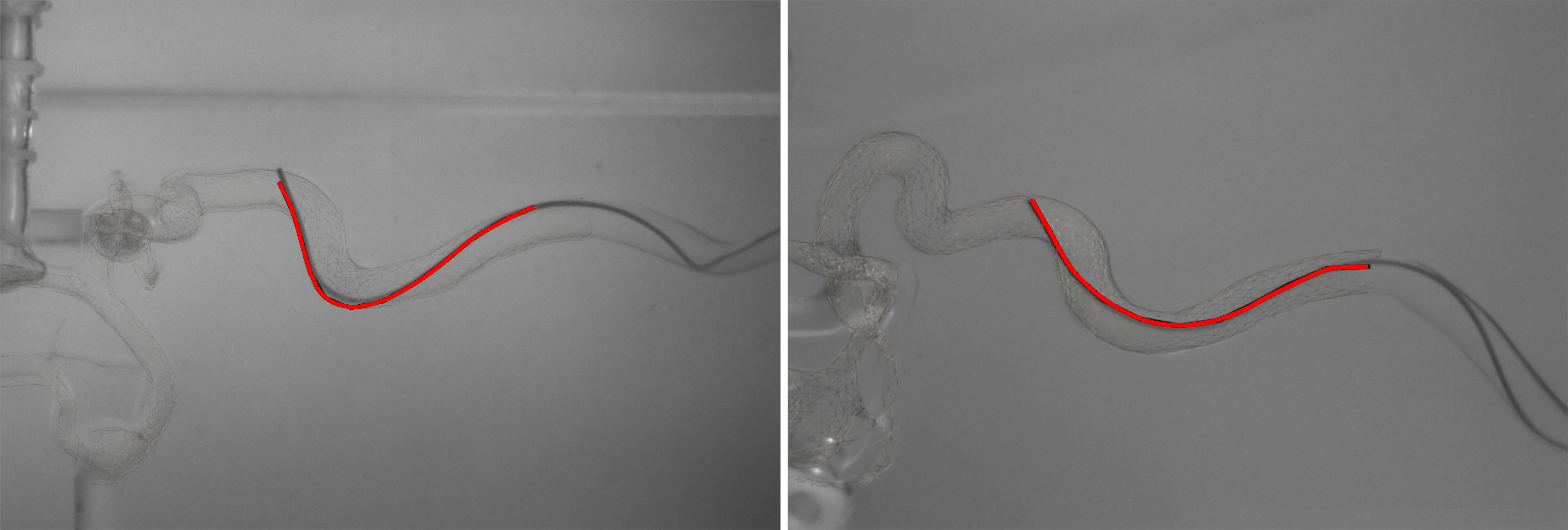
We developed a method to reconstruct the 3D shape of the interventional device, based on a constrained physics-based simulation combined with 2D monocular fluoroscopic images through a Bayesian filter (see Fig. 4). Whereas the physics-based model provides a prediction of the device shape within the blood vessel, taking into account non-linear interactions between the catheter and the surrounding anatomy adds further information on its current position. In addition, an Unscented Kalman Filter is used to combine the navigation model with the 2D external observations. We focused on a medical application as we believe the method could provide an actual solution to some of the current limitations of fluoroscopy-based procedures. The use of a Bayesian formalism allows for retrieving a good estimate in presence of ambiguous views (i.e. in presence of overlapping anatomies) and to take into account uncertainties on the prediction model (errors in constraint definition, as well as inaccuracies in the mechanical characterization of the catheter) and errors in the external measurements.
The method has been implemented through software developed within the team; for more details see sec. 6.4 and 6.3. Validation has been performed on porcine in-vivo data, acquired in accordance with UE norms, in collaboration with Pr. Mario GIMENEZ and Dr. Alain GARCIA from IHU-Strasbourg.