

Section: New Results
Visual Data Analysis
Scene depth, Scene flows, 3D modelling, Light-fields, 3D point clouds
Super-rays for efficient light fields processing
Participants : Matthieu Hog, Christine Guillemot.
Light field acquisition devices allow capturing scenes with unmatched post-processing possibilities. However, the huge amount of high dimensional data poses challenging problems to light field processing in interactive time. In order to enable light field processing with a tractable complexity, we have addressed, in collaboration with Neus Sabater (Technicolor) the problem of light field over-segmentation. We have introduced the concept of super-ray, which is a grouping of rays within and across views, as a key component of a light field processing pipeline. The proposed approach is simple, fast, accurate, easily parallelisable, and does not need a dense depth estimation. We have demonstrated experimentally the efficiency of the proposed approach on real and synthetic datasets, for sparsely and densely sampled light fields. As super-rays capture a coarse scene geometry information, we have also shown how they can be used for real-time light field segmentation and for correcting refocusing angular aliasing. The concept of super-rays has been extended to video light fields addressing problems of temporal tracking of super-rays using sparse scene flows[15].
Scene depth estimation from light fields
Participants : Christian Galea, Christine Guillemot, Xiaoran Jiang, Jinglei Shi.
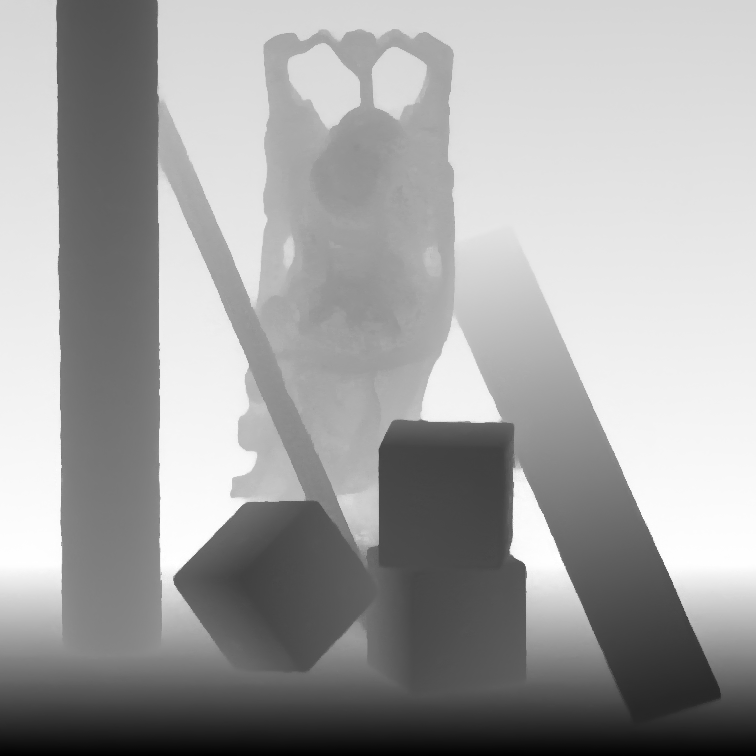
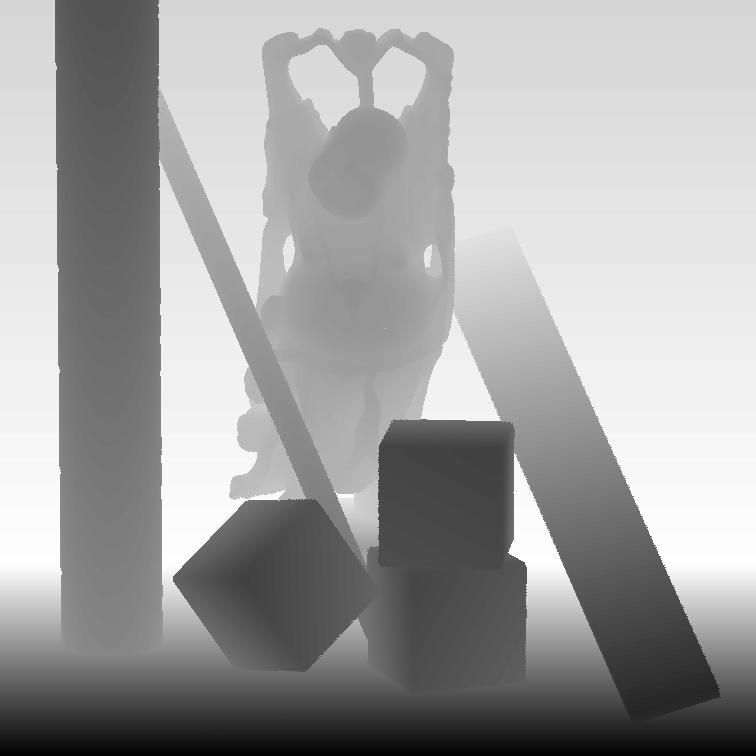
While there exist scene depth and scene flow estimation methods, these methods, mostly designed for stereo content or for pairs of rectified views, do not effectively apply to new imaging modalities such as light fields. We have focused on the problem of scene depth estimation for every viewpoint of a dense light field, exploiting information from only a sparse set of views [17]. This problem is particularly relevant for applications such as light field reconstruction from a subset of views, for view synthesis, for 3D modeling and for compression. Unlike most existing methods, the proposed algorithm computes disparity (or equivalently depth) for every viewpoint taking into account occlusions. In addition, it preserves the continuity of the depth space and does not require prior knowledge on the depth range. Experiments show that, both for synthetic and real light fields, our algorithm achieves competitive performance compared to state-of-the-art algorithms which exploit the entire light field and usually generate the depth map for the center viewpoint only. Figure 2 shows the estimated depth map for a synthetic light field in comparison with the ground truth. The estimated depth maps allow us to construct accurate 3D point clouds of the captured scene [16]. This work is now pursued considering deep learning solutions.
|

Scene flow estimation from light fields
Participants : Pierre David, Christine Guillemot.
Temporal processing of dynamic 3D scenes requires estimating the displacement of the objects in the 3D space, i.e., so-called scene flows. Scene flows can be seen as 3D extensions of optical flows by also giving the variation in depth along time in addition to the optical flow. Estimating dense scene flows in light fields pose obvious problems of complexity due to the very large number of rays or pixels. This is even more difficult when the light field is sparse, i.e., with large disparities, due to the problem of occlusions. We have addressed the complexity problem by designing a sparse estimation method followed by a densification step that avoids the difficulty of computing matches in occluded areas. The developments in this area are also made difficult due to the lack of test data, i.e., there is no publicly available synthetic video light fields with the corresponding ground truth scene flows. In order to be able to assess the performance of the proposed method, we have therefore created synthetic video light fields from the MPI Sintel dataset. This video light field data set has been produced with the Blender software by creating new production files placing multiple cameras in the scene, controlling the disparity between the set of views.