

Section: New Results
Roof fitting
|
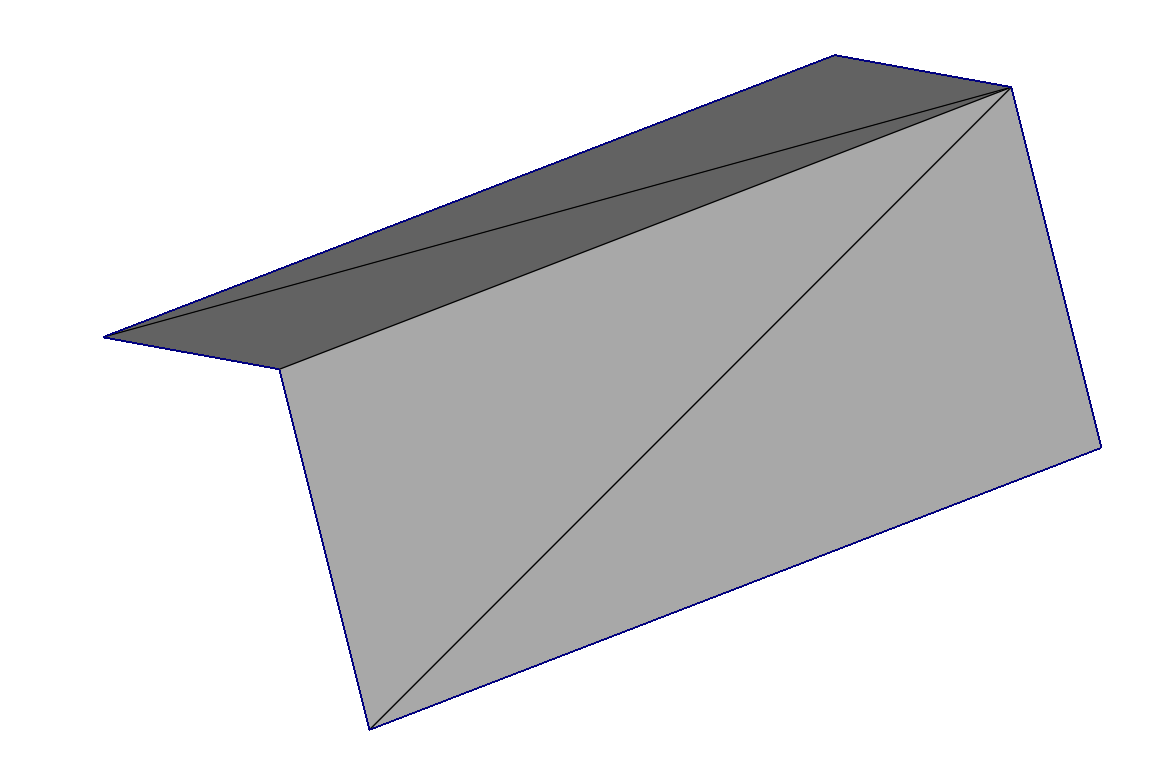
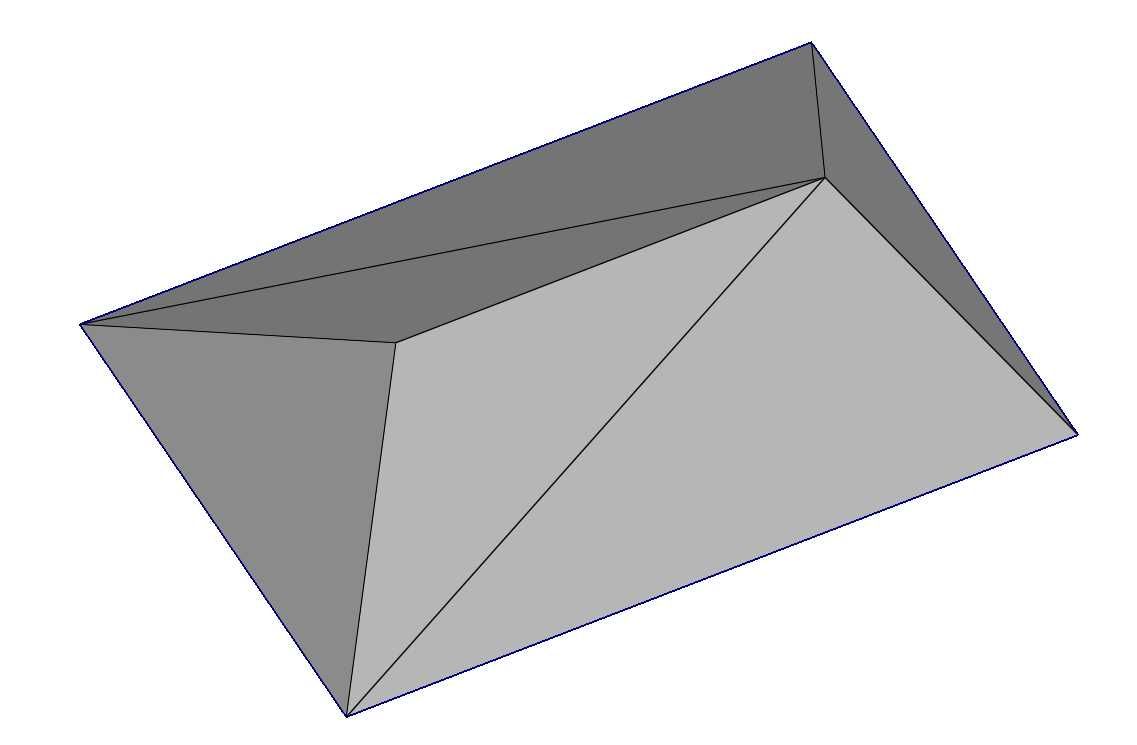
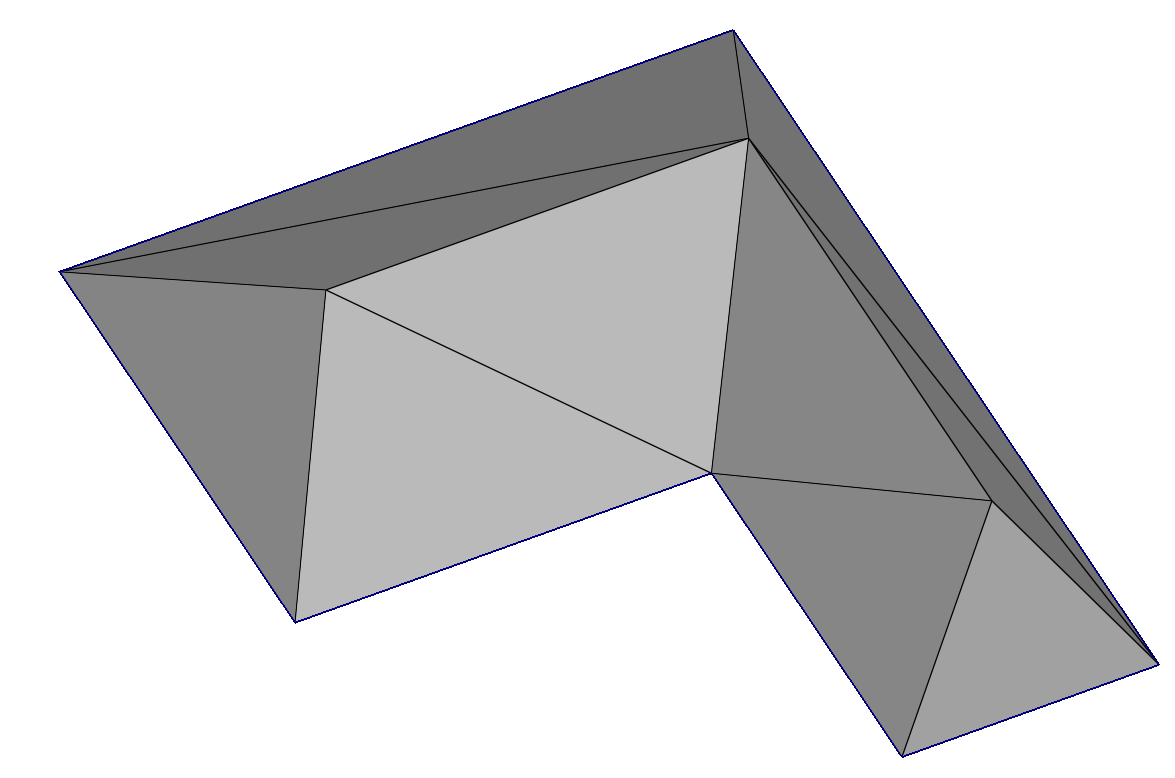
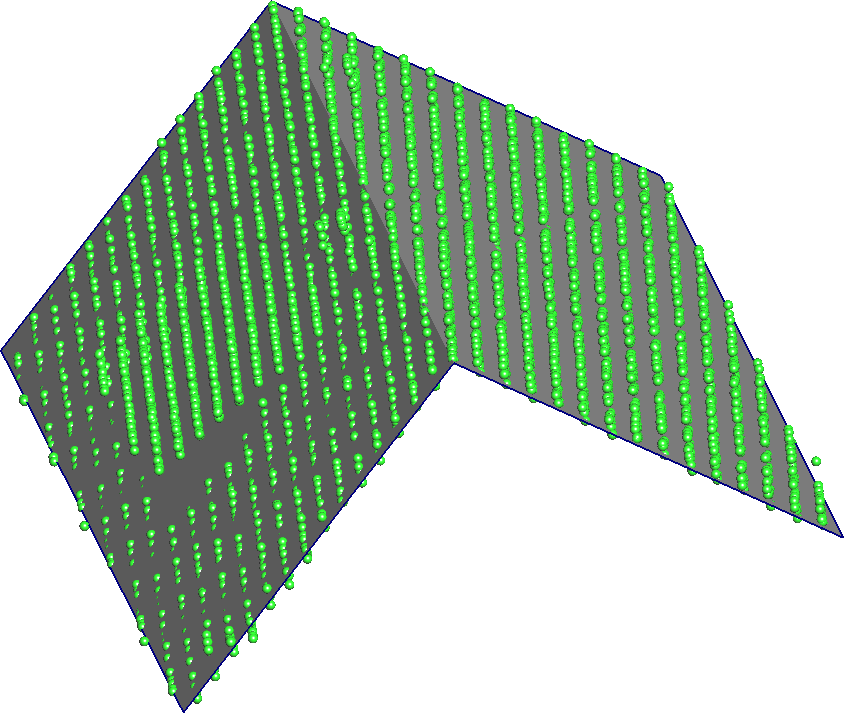
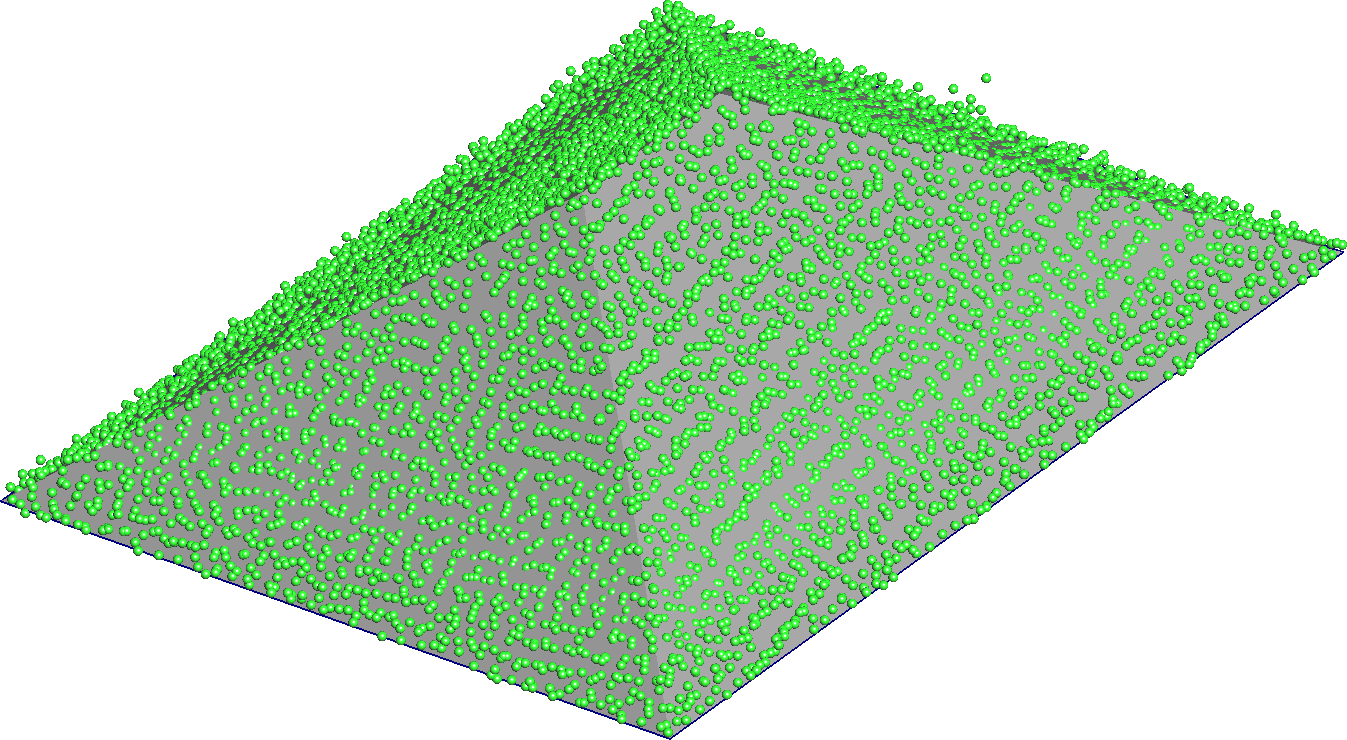
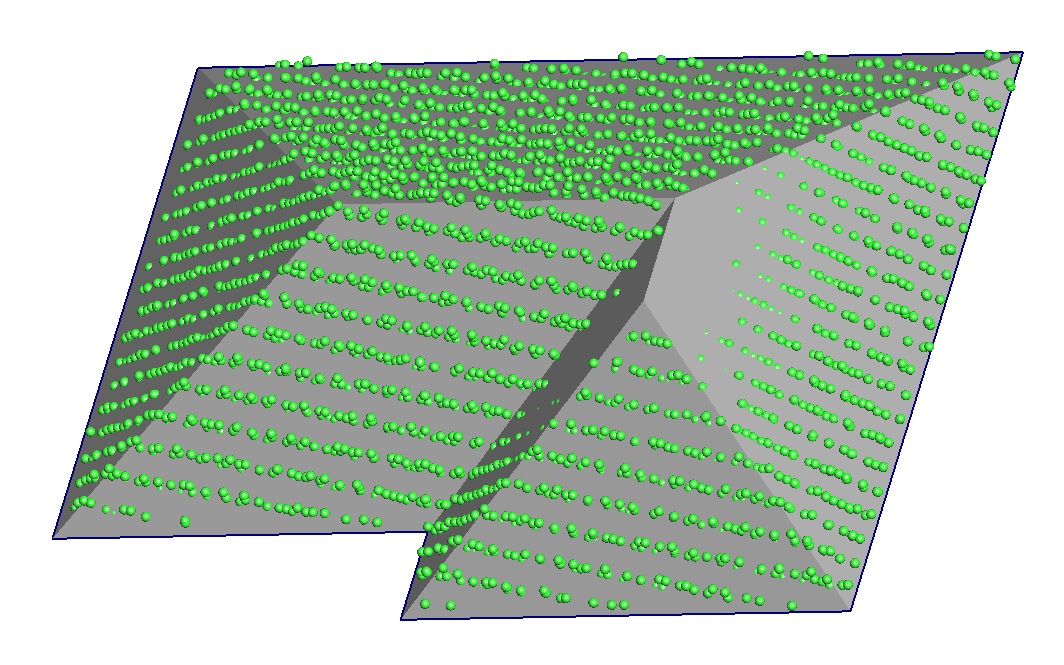
This work is done as part of an informal (soon to be formalized) collaboration between our team and RhinoTerrain. We have roof models in the form of surface meshes (Figure 5). Our data are LIDAR point clouds. Based on this data and a roof model chosen by the user, we seek to optimize the position of the model so that it “best” matches the data. This optimization must comply with two constraints:
-
It is important to ignore possible outliers in the point cloud, such as parts that do not belong to the roof (trees, electrical wires, etc.) or should not be taken into account by the model (chimney, skylight, parabolic antenna, etc.);
-
The roof geometry is subject to certain constraints, such as the planarity of certain rectangular faces or the alignment of certain axes.
This work is an extension of the VSDM algorithm (Voronoï Squared Distance Minimization) developed by the team [31]. The idea is to optimize a well-chosen energy function, the overall minimum of which corresponds to the desired position for the mesh size. The preliminary results are very promising, and we are preparing a publication.