

Section: New Software and Platforms
ICAV
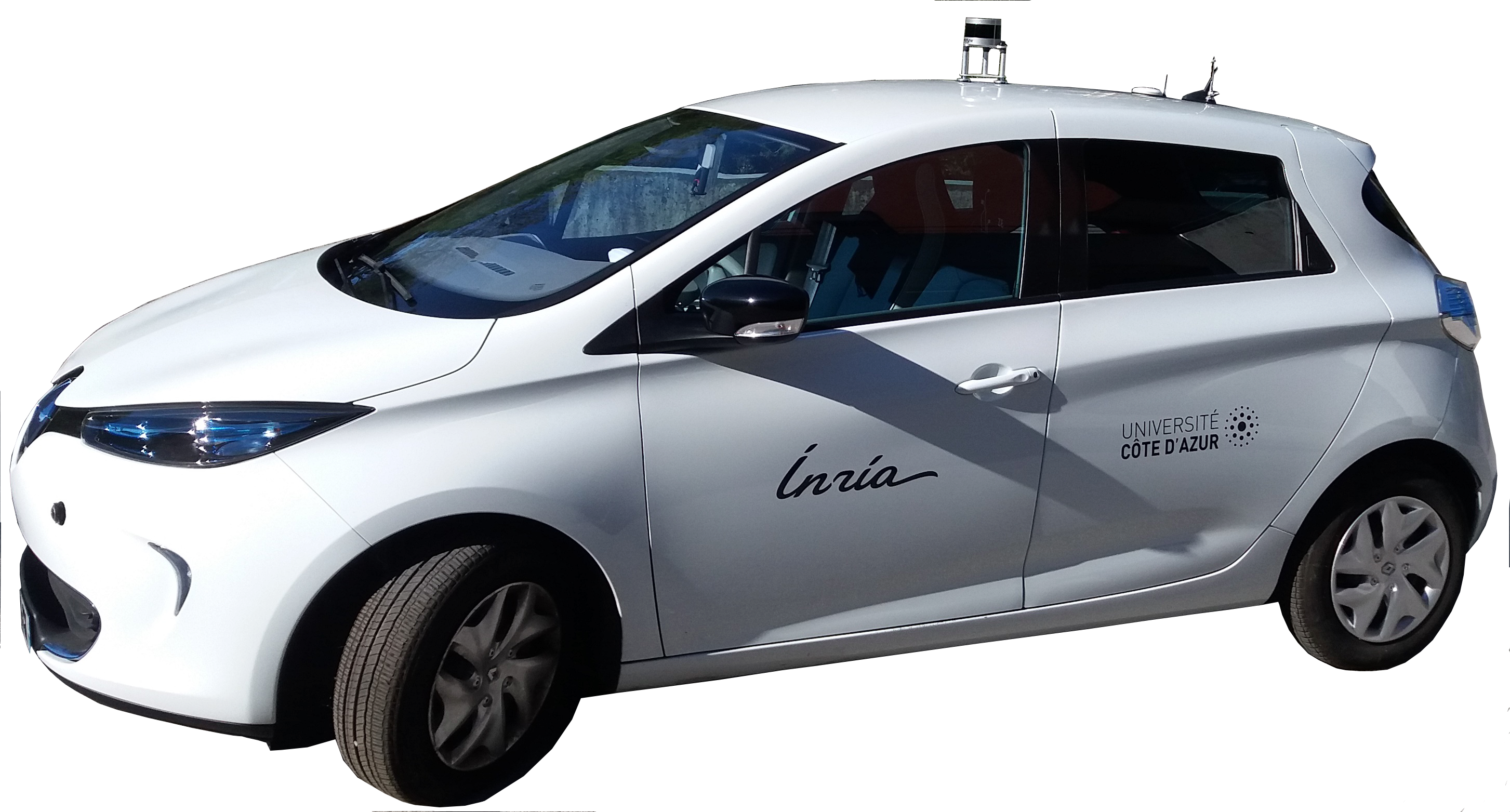
ICAV is an Intelligent and Connected Autonomous Vehicle. It is composed of a Renault ZOE robotized by Ecole Centrale of Nantes (by the team setup by Philippe Martinet in LS2N/ARMEN).

The robotization allows to have access to the control of:
In its original version, it is composed of embedded sensors:
and one embedded computer, with a web interface connected to a simple tablet. All the equipments are connected to the existing comfort battery. This equipment has been funded by UCA (Digital Reference Centre) and delivered late 2018.
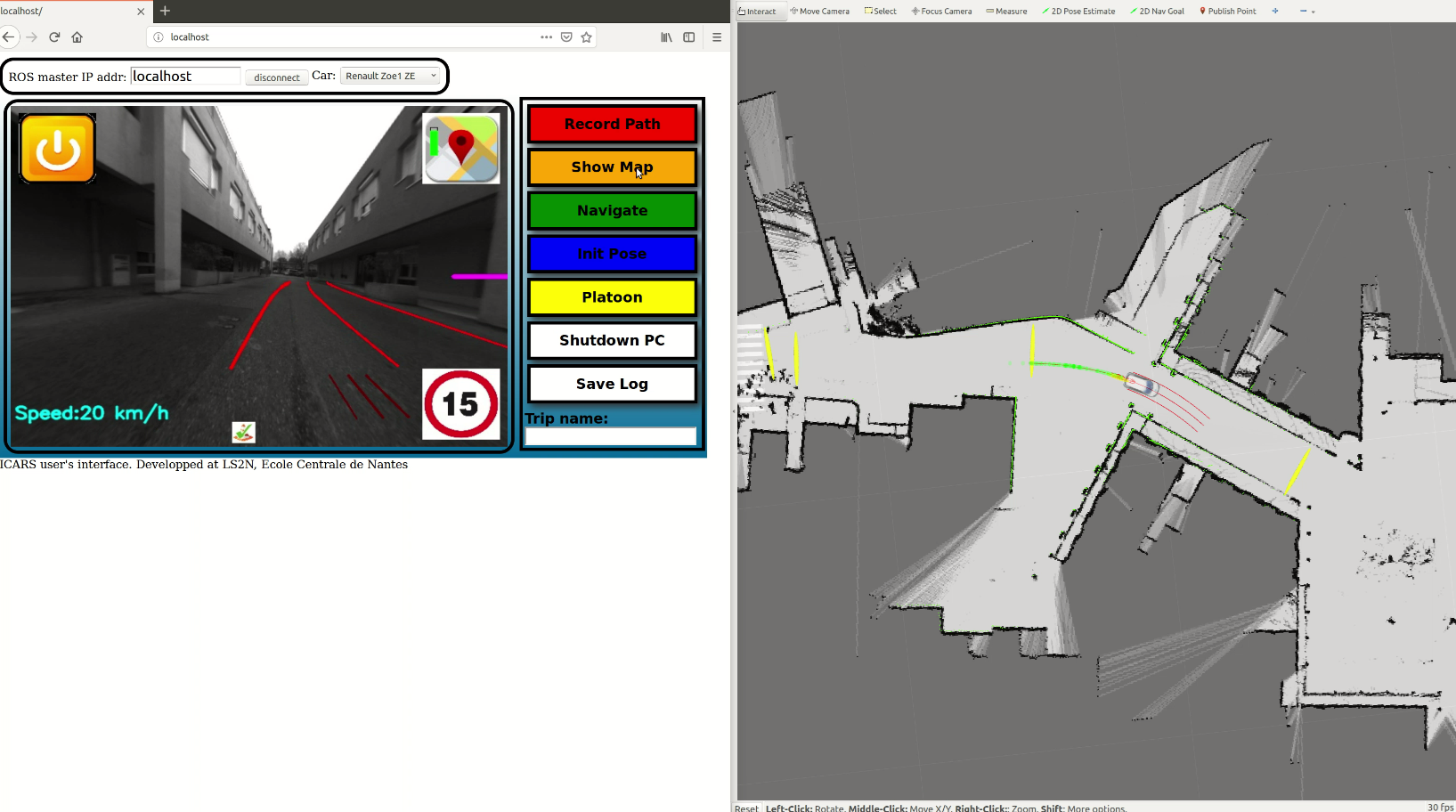
In addition, in the framework of a collaboration between CHORALE and LS2N/ARMEN one global application of Mapping/Localization/Navigation/Parking is installed in the vehicle. This application is using LIDAR VLP16 based mapping algorithm developed in Nantes including the last two years collaboration work between CHORALE and ARMEN. In January 2019, we have done the map of the Inria Sophia Antipolis Center, and other places of Sophia Antipolis. On all places, it is possible to localize the vehicle, register a path and then proceed to autonomous navigation (if we obtain the authorization to make it). Fast prototyping tools environment called ICARS is available for both simulation and development purposes.
In december 2019, we have evaluated the navigation algorithm on the new experimental site made available by CASA.



In the near future, in the framework of the project SPHERE we will integrate a novel 360 degree camera system with the Perception360 platform and embed this system in ICAV. A global 360 degree navigation system will be developed.