Section: New Results
Toward Shape Optimization of Soft Robots
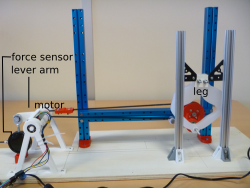
This year, we obtained new results on shape optimization for soft robotics where the shape is optimized for a given soft robot usage. To obtain a parametric optimization with a reduced number of parameters, we relied on an approach where the designer progressively refines the parameter space and the fitness function until a satisfactory design is obtained. In our approach, we automatically generate FEM simulations of the soft robot and its environment to evaluate a fitness function while checking the consistency of the solution. Finally, we have coupled our framework to an evolutionary optimization algorithm, and demonstrated its use for optimizing the design of a deformable leg of a locomotive robot. A paper presenting the approach was accepted at IEEE/International Conference On Soft-Robotics2019 [29].