Section:
New Results
Modeling Novel Soft Mechanosensors based on Air-Flow Measurements
In this work, we introduce a new pneumatic mechanosensor dedicated to Soft Robotics and propose a generic method to reconstruct the magnitude of a contact-force acting on it. This is illustrated by Fig. 5.
Changes in cavity volumes inside a soft silicon pad are measured by air-flow sensors. The resulting mechanosensor is characterized by its high sensitivity, repeatability, dynamic range and accurate localization capability in 2D. Using a regression found by machine learning techniques we can predict the contact location and force magnitude accurately when the force magnitudes are within the range of the training data. To be able to provide a more general model, a novel approach based on a Finite Element Method (FEM) is introduced. We formulate an optimization problem, which yields the contact load that best explains the observed changes in cavity volumes. This method makes no assumptions on the force range, the shape of the soft pad or the shape of its cavities. The prediction of the force also results in a model for the deformation of the soft pad. We characterize our sensor and evaluate two designs, a soft pad and a kidney-shaped sensor, in different scenarios. A paper was accepted for the journal Robotics and Automation Letters (RA-L) [5]. Furthermore, an extended abstract was accepted at the RoboTac 2019 Workshop at IROS 2019, leading to a presentation of a demo of the proposed technology.
Figure
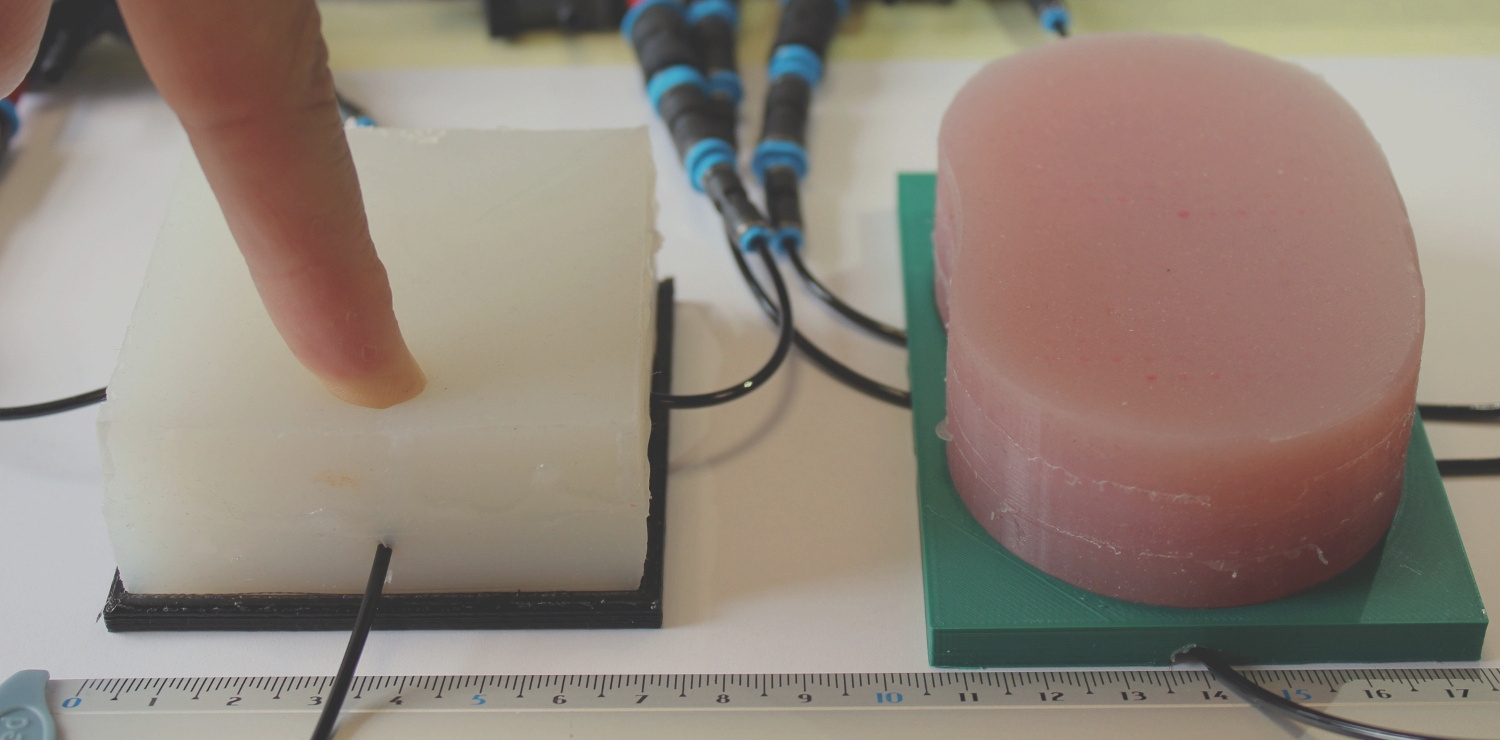
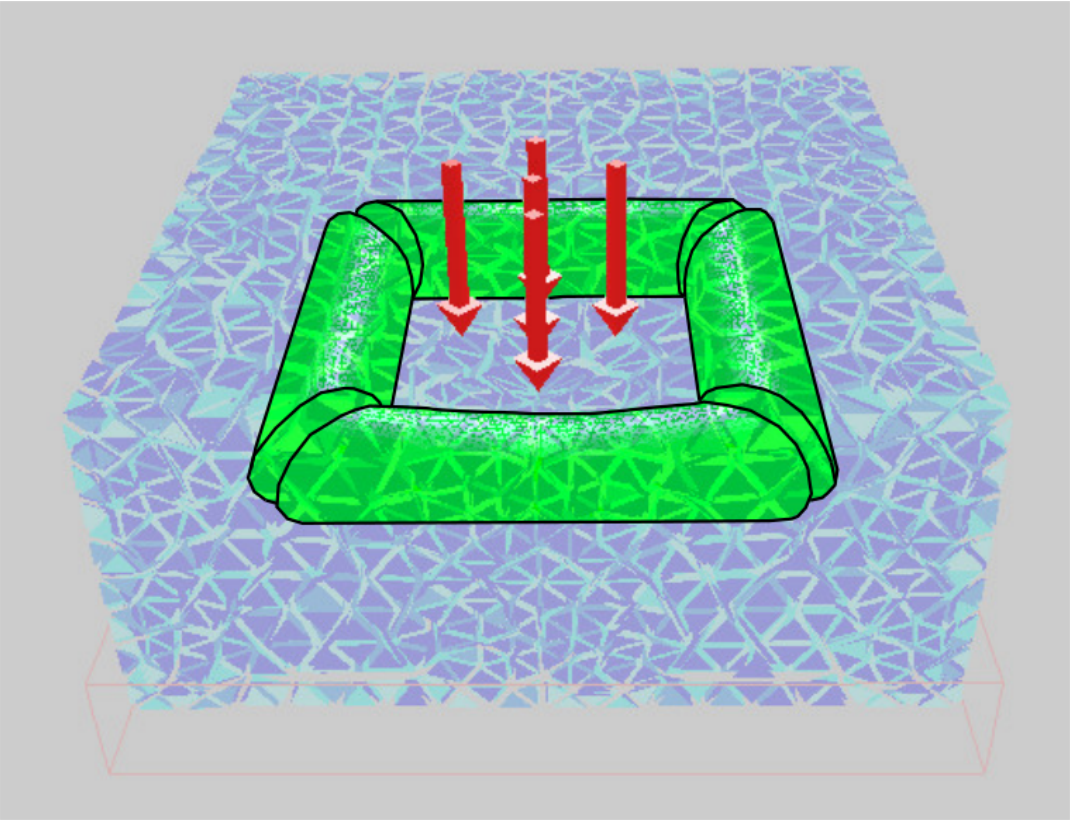
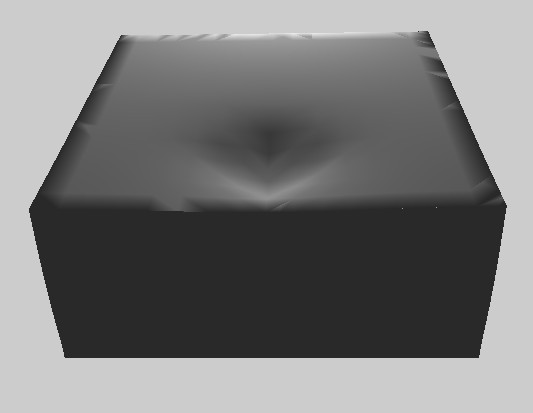
5. In this work, we show two designs of a novel soft mechanosensor made out of silicone (top, a soft pad and a kidney). When an external force is applied, the volume of cavities embedded in the silicone changes (left). This change in volume is registered through air-flow sensors. Using machine learning and FEM-based techniques, we show that it is possible to estimate the location and magnitude of an external force on the mechanosensor. Using the FEM also yields an estimation of the deformation of the sensor (left and right).
|
|