Section: New Results
Collective propulsion: collaboration with ONERA
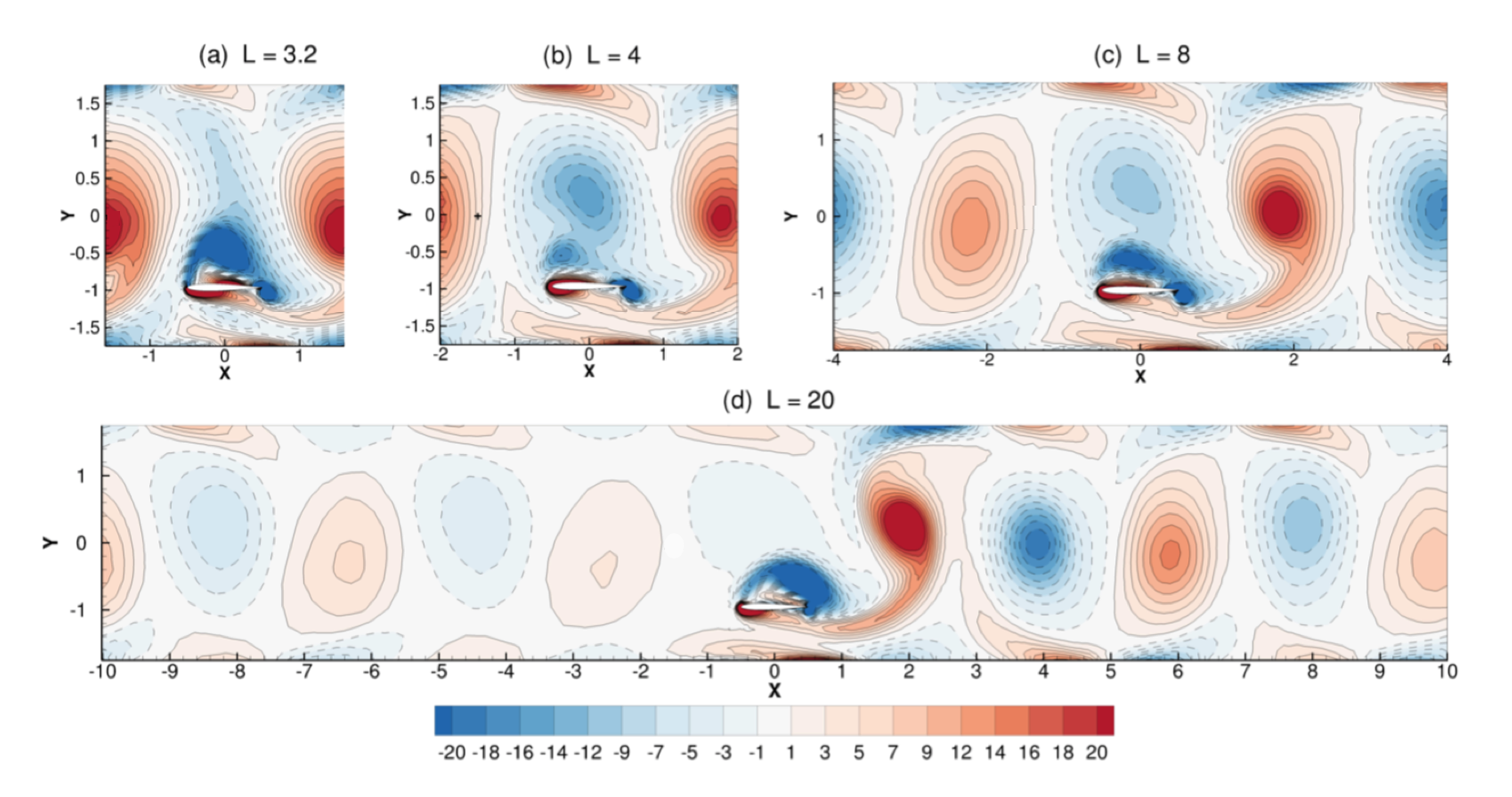
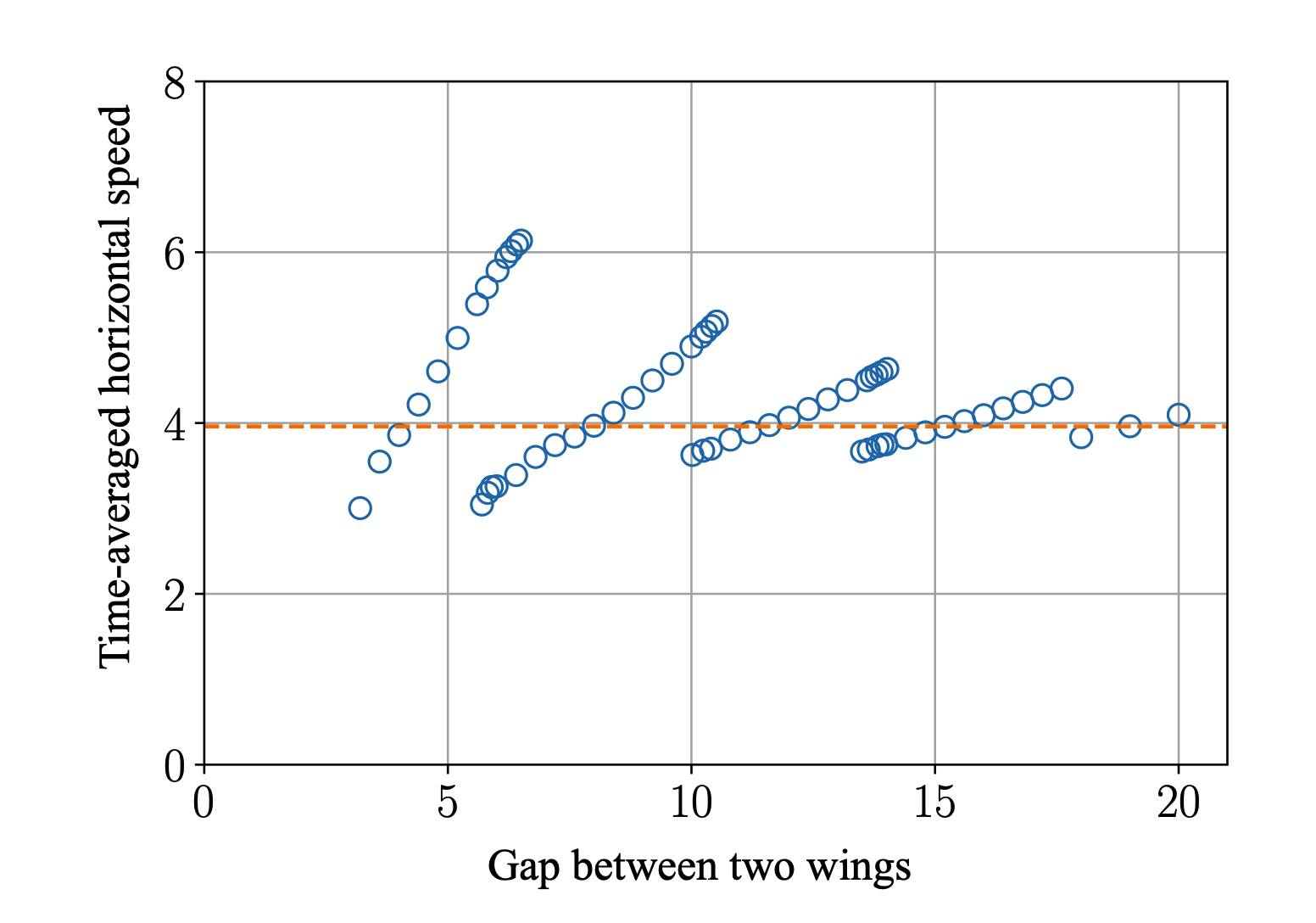
Motivated by recent studies and the locomotion of animal groups for robotics, we investigated the influence of hydrodynamic interactions on the collective propulsion of flapping wings. We studied the horizontal locomotion of an infinite array of flapping wings separated by a constant gap using unsteady non-linear simulations. Two control parameters were explored: the flapping frequency and the gap between the wings. Results obtained for different gaps at a fixed frequency are shown in Figure 14. We first observe that for a very large spacing between the wings — greater than 20 times the chord of a wing — the interaction effects are no longer present (Figure 14 (b)) and the average speed of the system tends to the speed of a single wing. For lower gaps, the average speed may become lower or higher than that of a single wing. For certain gaps, one can find two different stable solutions: one at higher propulsion speed and the other lower than a single wing. This phenomenon has already been observed for a fixed spacing and different frequencies of movement. The stability of these solutions is linked to the interaction between the vortex wake generated by the previous wings and the vortex ejected at the leading or trailing edge of the considered wing (Figure 14 (a)). We remark that propulsive efficiency is higher for the collective case both in faster and slower solutions. Understanding the key mechanisms responsible for the stable solutions will provide directions to control strategies aiming to optimize the wing horizontal speed.