

Section: New Results
Sports
MimeTIC promotes the idea of coupling motion analysis and synthesis in various domains, especially sports. More specifically, we have a long experience and international leadership in using Virtual Reality for analyzing and training sports performance. In 2019, we continued to explore 1) how enhancing on-site sports motion analysis using models inspired from motion simulation techniques, and 2) how Virtual Reality could be used to analyze and train motor and perceptual skills in sports.
Analysis of Fencing Lunge Accuracy and Response Time in Uncertain Conditions With an Innovative Simulator
Participants : Anthony Sorel [contact] , Richard Kulpa, Nicolas Bideau, Charles Pontonnier.
We conducted a study evaluating the motor control strategies implied by the introduction of uncertainty in the realization of lunge motions [27]. Lunge motion is one of the fundamental attacks used in modern fencing, asking for a high level of coordination, speed and accuracy to be efficient. The aim of the current paper was the assessment of fencer's performance and response time in lunge attacks under uncertain conditions. For this study, an innovative fencing lunge simulator was designed. The performance of 11 regional to national-level fencers performing lunges in Fixed, Moving and Uncertain conditions was assessed. The results highlighted notably that i) Accuracy and success decreased significantly in Moving and Uncertain conditions with regard to Fixed ones ii) Movement and Reaction times were also affected by the experimental conditions iii) Different fencer profiles were distinguishable among subjects. In conclusion, the hypothesis that fencers may privilege an adaptation to the attack conditions and preserve accuracy instead of privileging quickness was supported by the results. Such simulators may be further used to analyze in more detail the motor control strategies of fencers through the measure and processing of biomechanical quantities and a wider range of fencing levels. It has also a great potential to be used as training device to improve fencer's performance to adapt his attack to controlled opponent's motion.
Enactive Approach to Assess Perceived Speed Error during Walking and Running in Virtual Reality
Participants : Théo Perrin, Richard Kulpa [contact] , Charles Faure, Anthony Sorel, Benoit Bideau.
The recent development of virtual reality (VR) devices such as head mounted displays (HMDs) increases opportunities for applications at the confluence of physical activity and gaming. Recently, the fields of sport and fitness have turned to VR, including for locomotor activities, to enhance motor and energetic resources, as well as motivation and adherence. For example, VR can provide visual feedbacks during treadmill running, thereby reducing monotony and increasing the feeling of movement and engagement with the activity. However, the relevance of using VR tools during locomotion depends on the ability of these systems to provide natural immersive feelings, specifically a coherent perception of speed. The objective of this study is to estimate the error between actual and perceived locomotor speed in VE using an enactive approach, i.e. allowing an active control of the environment. Sixteen healthy individuals participated in the experiment, which consisted in walking and running on a motorized treadmill at speeds ranging from 3 to 11 km/h with 0.5 km/h increments, in a randomized order while wearing a HMD device (HTC Vive) displaying a virtual racetrack. Participants were instructed to match VE speed with what they perceived was their actual locomotion speed (LS), using a handheld Vive controller. They were able to modify the optic flow speed (OFS) with a 0.02 km/h increment/decrement accuracy. An optic flow multiplier (OFM) was computed based on the error between OFS and LS. It represents the gain that exists between the visually perceived speed and the real locomotion speed experienced by participants for each trial. For all conditions, the average of OFM was 1.00 ±.25 to best match LS. This finding is at odds with previous works reporting an underestimation of speed perception in VR. It could be explained by the use of an enactive approach allowing an active and accurate matching of visually and proprioceptively perceived speeds by participants. But above all, our study showed that the perception of speed in VR is strongly individual, with some participants always overestimating and others constantly underestimating. Therefore, a general OFM should not be used to correct speed in VE to ensure congruence in speed perception, and we propose the use of individual models as recommendations for setting up locomotion-based VR applications.
Acting Together, Acting Stronger? Interference Between Participants During Face-to-Face Cooperative Interception Task
Participants : Charles Faure, Théo Perrin, Richard Kulpa [contact] , Anthony Sorel, Anabelle Limballe, Benoit Bideau.
People generally coordinate their action to be more effective. However, in some cases, interference between them occur, resulting in an inefficient collaboration. The main goal of this study [16], [16] is to explore the way two persons regulate their actions when performing a cooperative task of ball interception, and how interference between them may occur. Starting face to face, twenty-four participants (twelve teams of two) had to physically intercept balls moving down from the roof to the floor in a virtual room. To this end, they controlled a virtual paddle attached to their hand moving along the anterior-posterior axis, and were not allowed to communicate. Results globally showed participants were often able to intercept balls without collision by dividing the interception space in two equivalent parts. However, an area of uncertainty (where many trials were not intercepted) appeared in the center of the scene highlighting the presence of interference between participants. The width of this area increased when situation became more complex and when less information was available. Moreover, participants often interpreted balls starting above them as balls they should intercept, even when these balls were in fine intercepted by their partner. Overall, results showed that team coordination emerges from between-participants interactions in this ball interception task and that interference between them depends on task complexity (uncertainty on partner’s action and visual information available).
Detection of Deceptive Motions in Rugby from Visual Motion Cues
Participants : Richard Kulpa [contact] , Anne-Hélène Olivier, Benoit Bideau.
|
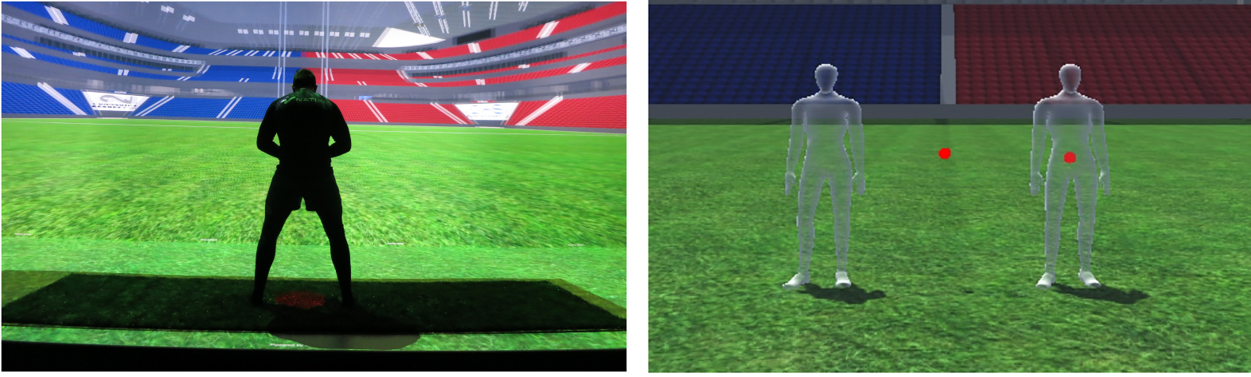
Frequently, in rugby, players incorporate deceptive motions (e.g., a side-step) in order to pass their opponent. Previous works showed that expert defenders are more efficient in detecting deceptive motions. Performance was shown to be correlated with the evolution of the center of gravity of the attacker, suggesting that experts may rely on global motion cues. This study [19] aims at investigating whether a representation of center of gravity can be useful for training purposes, by using this representation alone or by combining it with the local motion cues given by body parts. We designed an experiment in virtual reality to control the motion cues available to the defenders. Sixteen healthy participants (seven experts and nine novices) acted as defenders while a virtual attacker approached. Participants completed two separate tasks. The first was a time occlusion perception task, occlusion after 100ms, 200ms or 300ms after the initial change in direction, thereafter participants indicated the passing direction of the attacker. The second was a perception-action task Figure 5, participants were instructed to intercept the oncoming attacker by displacing medio-laterally. The attacker performed either a non-deceptive motion, directly toward the final passing direction or a deceptive motion, initially toward a false direction before quickly reorienting to the true direction. There was a main effect of expertise, appearance, cut off times and motion on correct responses during both tasks. There was an interaction between visual appearance and expertise, and between motion type and expertise during the perception task, however, this interaction was not present during the perception-action task. We observed that experts maintained superiority in the perception of deceptive motion; however when the visual appearance is reduced to global motion alone the difference between novices and experts is reduced. We further explore the interactions and discuss the effects observed for the visual appearance and expertise.
IMU-based Motion Capture for Cycling Performance
Participants : Nicolas Bideau [contact] , Guillaume Nicolas, Benoit Bideau, Sebastien Cordillet, Erwan Delhaye.
The quantification of 3D kinematical parameters such as body segment orientations and joint angles is important in the monitoring of cycling to provide relevant biomechanical parameters associated with performance optimization and/or injury prevention. Numerous experiments based on optoelectronic motion capture have been conducted in the laboratory to analyze kinematical variables (e.g., joint angles) during cycling. However, the assessment of kinematics in real conditions during training or competition is a challenging task, especially since conventional optoelectronic motion capture systems suffer from major drawbacks (restricted fields of view, cumbersome and time consuming) in this regard. To overcome these limitations, inertial measurement units (IMU) is a relevant solution for in situ cycling analysis as they allow a continuous data acquisition process throughout a cycling exercise. Beyond the common problem of the drift related to the integration of gyroscope data, one of the major issues in joint kinematics assessment using IMU devices lies is the misalignment of sensor axes with the anatomical body segment axis, which is not straightforward. Thus, we developed a novel sensor-to-segment calibration procedure for inertial sensor-based knee joint kinematics analysis during cycling. This procedure was designed to be feasible in-field, autonomously, and without any external operator or device. It combines a static standing up posture and a pedaling task. In comparison with conventional calibration methods commonly employed in gait analysis, the new method we proposed significantly improved the accuracy of 3D knee joint angle measurement when applied to cycling analysis [14]. As a second step related to the in-field application to track cycling, we estimated lower limb joint angles during a time trial on a velodrome. This integrative measurement exhibited the evolution of kinematic parameters in relation with distance but also with the track curvature [43].