

Section: New Results
Human Centered Navigation in the physical world
Goal oriented risk based navigation in dynamic uncertain environment
Participants : Anne Spalanzani, Jorge Rios-Martinez, Amaury Nègre, Arturo Escobedo-Cabello, Christian Laugier.
Navigation in large dynamic spaces has been adressed often using deterministic representations, fast updating and reactive avoidance strategies. However, probabilistic representations are much more informative and their use in mapping and prediction methods improves the quality of obtained results.
Since 2008 we have proposed a new concept to integrate a probabilistic collision risk function linking planning and navigation methods with the perception and the prediction of the dynamic environments [47] . Moving obstacles are supposed to move along typical motion patterns represented by Gaussian Processes or Growing HMM. The likelihood of the obstacles' future trajectory and the probability of occupation are used to compute the risk of collision. The proposed planning algorithm, call Risk-RRT, is a sampling-based partial planner guided by the risk of collision. Results concerning this work were published in [48] [49] [50] .
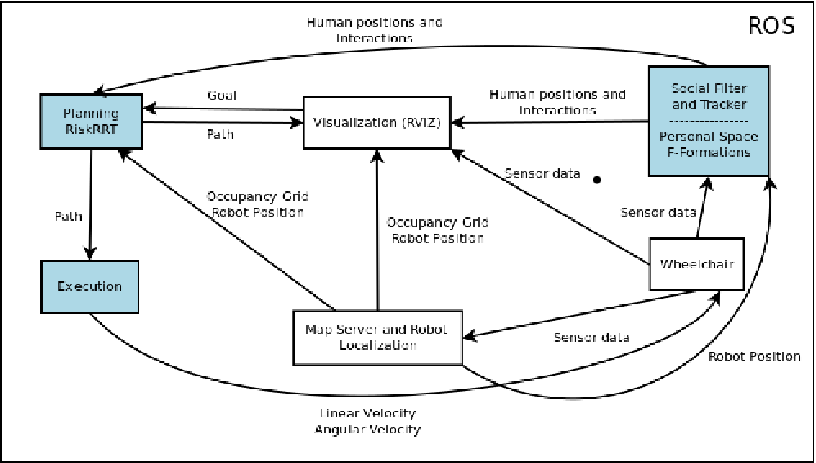
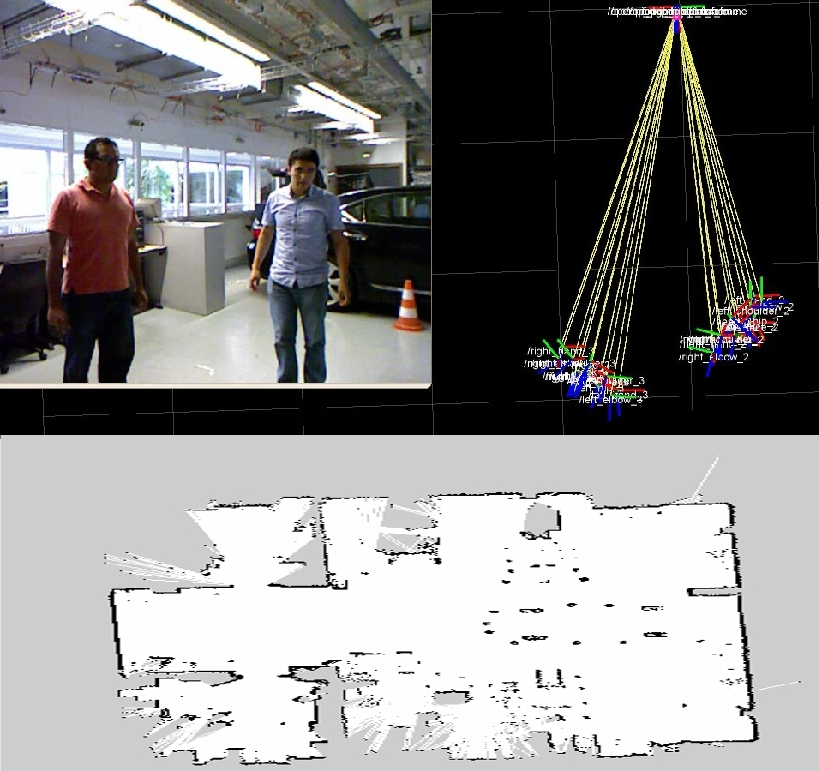
In 2011, our algorithms were integrated into an embedded sofware architecture for social aware navigation (see fig. 16 ). For this purpose we started to migrate our algoritmhs to a new experimental plateform. Moreover, we adapted the code to the open source software called ROS (Robot Operating systems (Willow Garage Inc., http://www.ros.org )) which offers tools to develop robot applications based in state of the art algorithms. Particularly, localization and visualization tools have been used. We have linked the control of our robotic wheelchair, the Risk-RRT planning and the social filter modules described in 6.2.2 into the framework ROS as shown in figure 16 . The main objective was to increase the visibility of our approach and develop common libraries with research groups in robotics. In 2011, in the scope of the AEN PAL project, we started a collaboration with the EPI Arobas and complementary developements have been put on the INRIA forge.
Next two sections are conducted under the french project PAL “Personally Assisted Living” with a goal to enhance the quality of living by providing more autonomy in the daily activities of the disabled.
Social conventions based navigation
Participants : Jorge Rios-Martinez, Anne Spalanzani, Christian Laugier.
The objectives of this work are to integrate the notion of comfort in the classical safe navigation methods. If one consider that the navigation system transports a person, the integration of social conventions in the navigation strategy starts to be crucial. In this work, we propose to integrate the notions of personal space and interaction between people. We propose to enrich the knowlegde the robot has, with a representation of the social conventions. The robot must take into consideration interactions to avoid groups of people (even if passing through the group is the “best ”path for a conventionnal planning algorithm), or to join a group with a behavior close to the one of a human. To understand the behaviors of interaction between humans and the management of space, the works developed in the area of sociology to define some concepts as Personal space, o-space and F-formations are used.
-
Personal Space
In [53] , Hall describes the use of space between humans, he observed the existence of some rules that conducted people to keep distances from others. He proposed a classification of the space around a person (its Personal Space) in social interaction in four zones:
This is a useful tool for a robot to understand the intentions of the humans. It is well known that these measures are not stricts and that they change depending on age, culture and type of relationship but the categories proposed explain very well reactions like the uncomfortable sense of a stranger invading your intimate zone or the perception of somebody looking social interaction because he is entering to your social zone.
-
F-formation
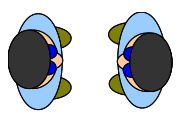
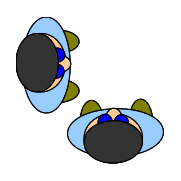
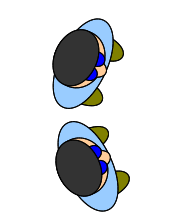
In [57] , Kendon observed that people interacting in groups follow some spatial patterns of arrangement. When people are executing some activity they claim an amount of space related to that activity, this space is respected by other people and Kendon referred it as individual's transactional segment. This transactional segment can vary depending on body size, posture, position and orientation during the activity. Moreover the groups can establish a joint or shared transactional segment and only the intervenants have permitted access to it, they protect it and others tend to respect it. The o-space is that shared transactional segment. A F-formation system is the spatial-orientation arrangement that people create, share and maintain around their o-space. We can see in fig. (17 ) three examples of F-formations.
The first stage in order to achieve an integration of social concepts with robot navigation was to include estimations of the risk of disturbing personal space and interaction space in the general risk estimation. A strategy to detect interactions in the environment based in the velocity, position and orientation of humans was implemented.
|
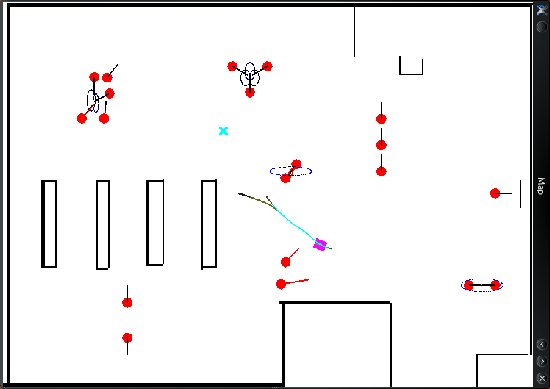
In fig. 18 we observe the results of the proposed integration, the robot (green rectangle) can use the detections of conversations (light ellipses) between humans (blue circles) for add more risk to paths that invade the space of conversations. When a conversation is detected, a bi-dimensional Gaussian is created to represent the interaction space, also called o-space, the center of this space is approximated by taking into account the the participants' poses. Then, is used to obtain an estimation of risk of disturbing by passing around the conversation. The navigation strategy is based on the Risk-RRT algorithm. Details of this approach were published in [18] .
Autonomous Wheelchair for the Elderly People's Assistance
Participants : Arturo Escobedo-Cabello, Anne Spalanzani, Christian Laugier.
The elderly and the disabled are expected to benefit from the new technologies in the field of autonomous navigation robotics. Normal users of electric wheelchairs will also benefit from the development of more automatic functionalities bringing an extra driving comfort, especially during delicate maneuvers such as narrow door passages. This contribution is similar to the installation of driving assistance on a car. A simple improvement of the classical powered wheelchair can often diminish several difficulties of control.
Comfort defined as a state of ease and satisfaction of bodily wants, with freedom from pain and anxiety, has recently emerged as a design goal in autonomous navigation systems. Designers are becoming more aware of the importance of the user when scheming solution algorithms. The idea of comfort is especially important in the case of wheelchairs where the occupants are weak as result of their age or disease.
For any robot that is designed to transport people, the trajectory should be smooth and correspond to the user’s understanding as much as possible. Since human interpretation of the environment often differs from a robot’s interpretation, the decisions taken by the system might seem incomprehensible to a human observer. For example an autonomous vehicle could refuse to move forward due to some obstacle, while a human user would easily be able to move its way through. This undesirable behaviors may prove irritating and with time may lead to users stopping from using the system.
In 2011 we setup a robotic wheelchair as a trial platform. The wheelchair is a differential drive robot equiped with a SICK LMS-200 lidar to get 2D range information from the environment, odometry sensors, and a velocity controller we have also added a kinect sensor in order to perform some in the field of social interactions. Some basic functions can be executed including the mapping of the environment using a Rao-Blackwellized Particle Filter [52] , localization using an Adaptive Monte Carlo Localization approach (AMCL) [91] , global planning using an A* algorithm [60] and local reactive planning using the Dynamic Window Algorithm [46] .
Alongside we started working with the kinect sensor to detect and track people. Using the given tracking information, the wheelchair is able to follow a human located in front of it. This behavior is aimed to bring assistance not only to the user but also to the caregiver by allowing him to move without pushing the wheelchair. The technical implementation of the related approaches has been done on the basis of the ROS middleware due to easy integration with other opensourse robotics software which benefit sharing and testing developed software.
In 2012 we shall focus on the estimation of the user intentions by learning models of behavior. We'll then use these models to propose an adaptive autonomous navigation method that best answer the user needs.
|

Multi-Robot Distributed Control under Environmental Constraints
Participants : Agostino Martinelli, Alessandro Renzaglia.
This research has been carried out in the framework of the European project sFly. In recent years it is revealed more and more the importance of using multi-robot systems for security application, otherwise impossible to be performed by a single robot.
The main problem approached is the optimal surveillance coverage of an unknown and complex environment, i.e. finding the optimal deployment for the robots and the way to safely reach such configuration. The solution for the 2D case without obstacles is already known in literature [39] . On the other hand, for the non-convex case, it is still a difficult problem. In [84] we firstly proposed a possible strategy based on a combination of the repulsive potential field method and the Voronoi partition. Then, in the last two years we have mainly approached the coverage problem by using a new stochastic optimization method. This work is in collaboration with professor Elias Kosmatopoulos, from CERTH (Thessaloniki), and professor Lefteris Doitsidis, from TUC (Crete), partners in the sFly project.
The Kosmatopoulos's group has proposed a new adaptive stochastic optimization algorithm for a general class of multi-robot passive and active sensing applications [59] , [58] . This method possesses the capability of being able to efficiently handle optimization problems for which an analytical form of the function to be optimized is unknown, but the function is available for measurement at each iteration of the algorithm employed to optimize it. As a result, it perfectly suits for multi-robot optimal coverage in non-convex environments, where the analytical form of the function to be optimized is unknown but the function is available for measurement (through the robots' sensors) for each multi-robot configuration.
The main results obtained for the 2D case by using this method has been published in [85] , [83] . We assume the robots are equipped with global positioning capabilities and visual sensors able to monitor the surrounding environment. The goal is to maximize the area monitored by the team, by identifying the best configuration of the team members. Moreover, in 2011, a distributed version of the algorithm was presented in [17] . In multi-robot systems, a distributed approach is desirable for several fundamental reasons. The most important are failure of the central station and limited communication capabilities. The proposed approach has the following key advantages with respect to previous works:
-
it can solve the problem in a distributed way;
-
it does not require any a priori knowledge on the environment;
-
it works in any given environment, without the necessity to make any kind of assumption about its topology;
-
it can incorporate any kind of constraints, for instance regarding a possible existing threshold on the maximum distance on the monitored region, or a limited visibility angle;
-
it does not require a knowledge about these constraints since they are learnt during the task execution;
-
its complexity is low allowing real time implementations.
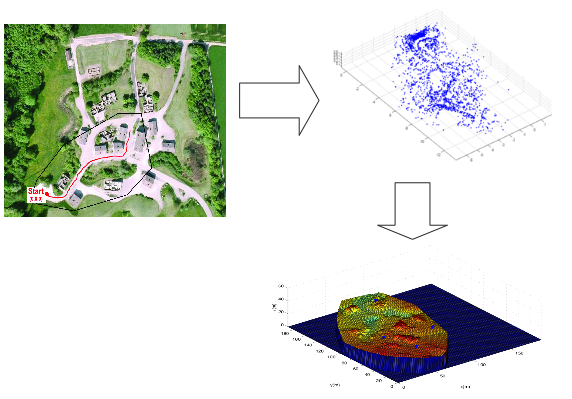
The previous approach has been also extended for the more important and realistic 3D case. Working in collaboration with the ETHZ (Zurich), some simulations using real data, which were collected with the use of a miniature quadrotor helicopter specially designed for the needs of the European project sFly, have been performed (see fig. 20 ). This work has lead to two joint publications with CERTH and TUC: one conference paper to present (CDC2011) and one journal papers under review, and two joint publications with CERTH, TUC and ETHZ: one conference paper ([10] ) and one journal papers under review.
In 2011, this approach has been combined with human aware navigation technics presented in section 6.2.5 .
|
In the next months, the algorithm will be implemented on real MAVs for the final demo of the project. This demo will include experimentation both in indoor and outdoor complex environments.
Finally, a new collaboration with professor Kosmatopoulos has recently begun. The objective of this work is to develop a new efficient and scalable algorithm for multi-robot active control to perform cooperative simultaneous localization and mapping (CSLAM) and target tracking. The main idea is to use a convex optimization algorithm based on Semi-Definite Programming and Sum-of-Squares polynomials. Preliminary simulation results are very promising and a journal paper is under preparation.
Exploring stochastic optimization method to navigate between humans
Participants : Jorge Rios-Martinez, Alessandro Renzaglia, Anne Spalanzani, Agostino Martinelli, Christian Laugier.
Suppose that we have a robot navigating in an unknown and complex environment where people are moving and interacting. In such scenario the respect of the humans' comfort becomes an important goal to achieve. The discomfort concept could be very general but we focus on the one mentioned before, i.e., the discomfort caused by disturbing one interaction or a personal space of humans. The approach here is to minimize the discomfort while the robot is navigating. As we cannot measure directly the value of discomfort, we can infer it by modeling the concepts presented before using simple equations and after by applying a method of optimization. We propose to exploit a new stochastic and adaptive optimization algorithm (CAO) [59] . This method is very useful in particular when the analytical expression of the optimization function is unknown but numerical values are available for any state configuration. Furthermore, the proposed method can easily incorporate any dynamical and environmental constraints. To validate the performance of the proposed solution, several simulation results are provided.
|
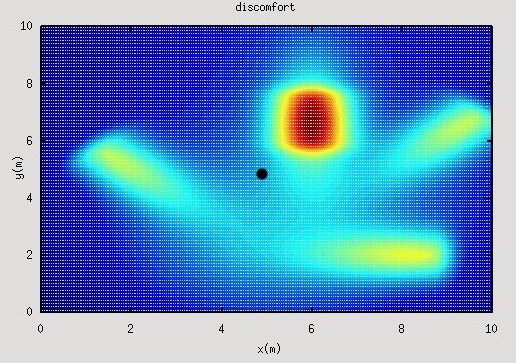
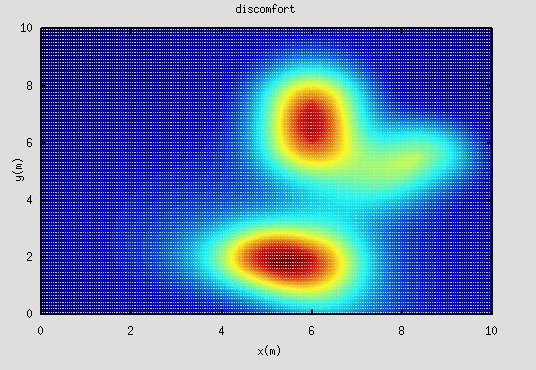
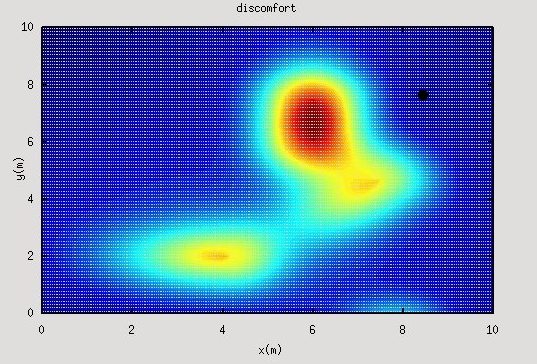
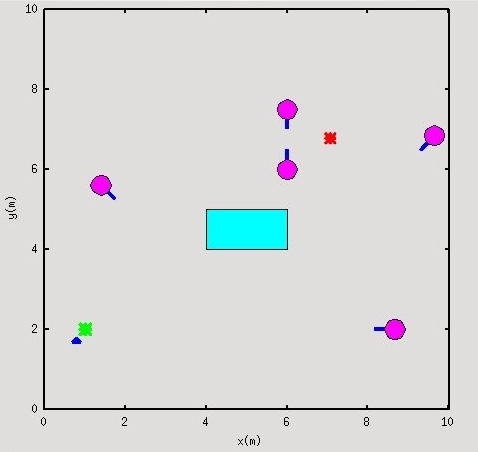
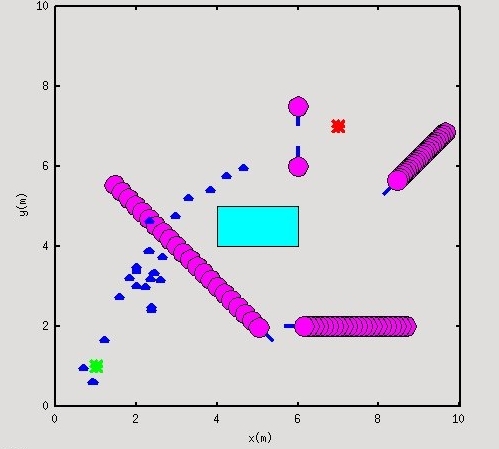
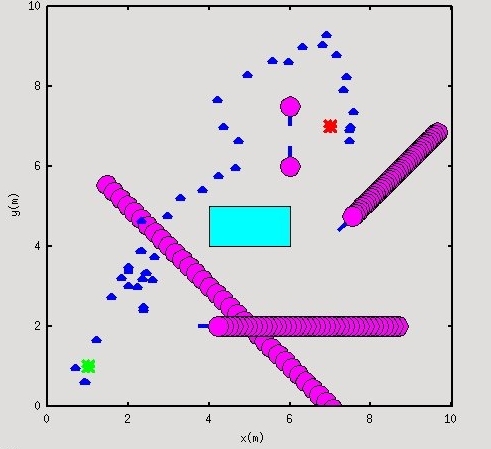
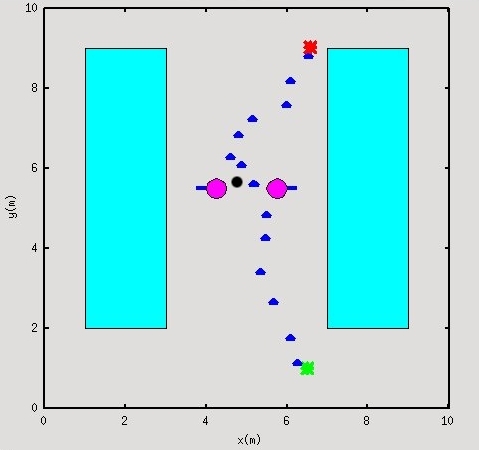
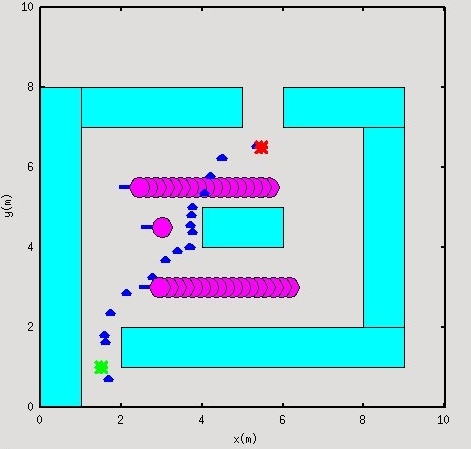
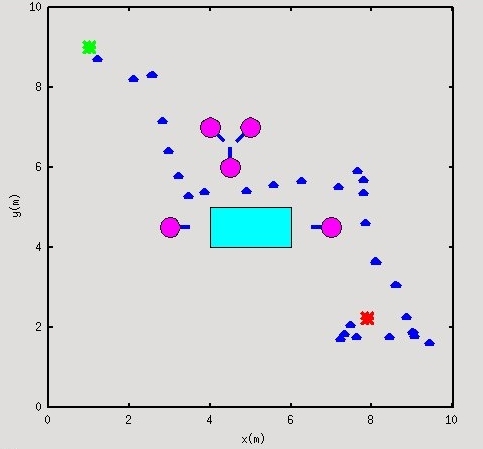
In fig. 21 the model for discomfort function is shown together with robot navigation. At each step the robot randomly generate configurations in the environment and selects the one that takes it closer to the goal while minimizing values for the discomfort function of humans in the environment, this is repeated until goal is reached. Several executions of proposed approach in different scenarios can be observed in fig. 22
|

The details of this approach have been submitted to ICRA2012.