

Section: Overall Objectives
Presentation
MimeTIC is a multidisciplinary team whose aim is to better understand and model human activity in order to simulate realistic autonomous virtual humans: realistic behavior, realistic motions and realistic interactions with other characters and users. It leads to modeling the complexity of a human body, his environment where he can pick-up information and he can act on it. A specific focus is dedicated to human physical activity and sports as it raises the highest constraints and the highest complexity when addressing these problems. Thus, MimeTIC is composed of experts in computer science and whose research interests are computer animation, behavioral simulation, motion simulation, crowds and interaction between real and virtual humans. MimeTIC is also composed of experts in sports science, motion analysis, motion sensing, biomechanics and motion control (M2S, joint lab. with University Rennes2, ENS Cachan and University Rennes1). Hence, the scientific foundations of MimeTIC are motion sciences (biomechanics, motion control, perception-action coupling, motion analysis), computational geometry (modeling of the 3D environment, motion planning, path planning) and design of protocols in immersive environments (use of virtual reality facilities to analyze human activity).
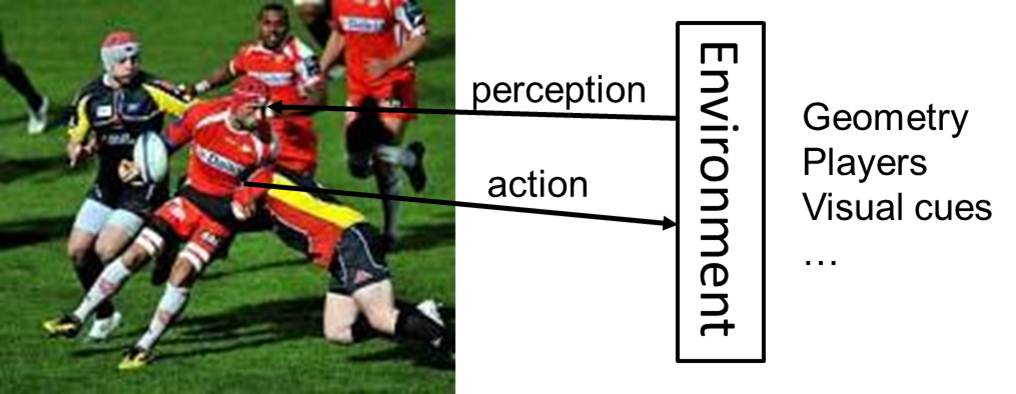
Thanks to these skills, we wish to reach the following objectives: to make virtual human behave, move and interact in a natural manner in order to increase immersion and to improve knowledge on human motion control. In real situations (see figure 1 ), people have to deal with their physiological, biomechanical and neurophysiological capabilities in order to reach a complex goal. Hence MimeTIC addresses the problem of modeling the anatomical, biomechanical and physiological properties of human being. Moreover this character has to deal with his environment. Firstly he has to perceive this environment and pick-up relevant information. MimeTIC thus addresses the problem of modeling the environment including its geometry and associated semantic information. Secondly, he has to act on this environment to reach his goal. It leads to cognivitve processes, motion planning, joint coordination and force production in order to act on this environment.
|
In order to reach the above objectives, MimeTIC has to address three main challenges:
dealing with the intrinsic complexity of human being, especially when addressing the problem of interactions between people for which it is impossible to predict and model all the possible states of the system,
making the different components of human activity control (such as the biomechanical and physical, the reactive, cognitive, rational and social layers) interact while each of them is modeled with completely different states and time sampling,
and being able to measure human activity while dealing with the compromise between ecological and controllable protocols, and to be able to extract relevant information in wide databases of information.
Contrary to many classical approaches in computer simulation, which mostly propose simulation without trying to understand how real people do, the team promotes a coupling between human activity analysis and synthesis, as shown in figure 2 .
|
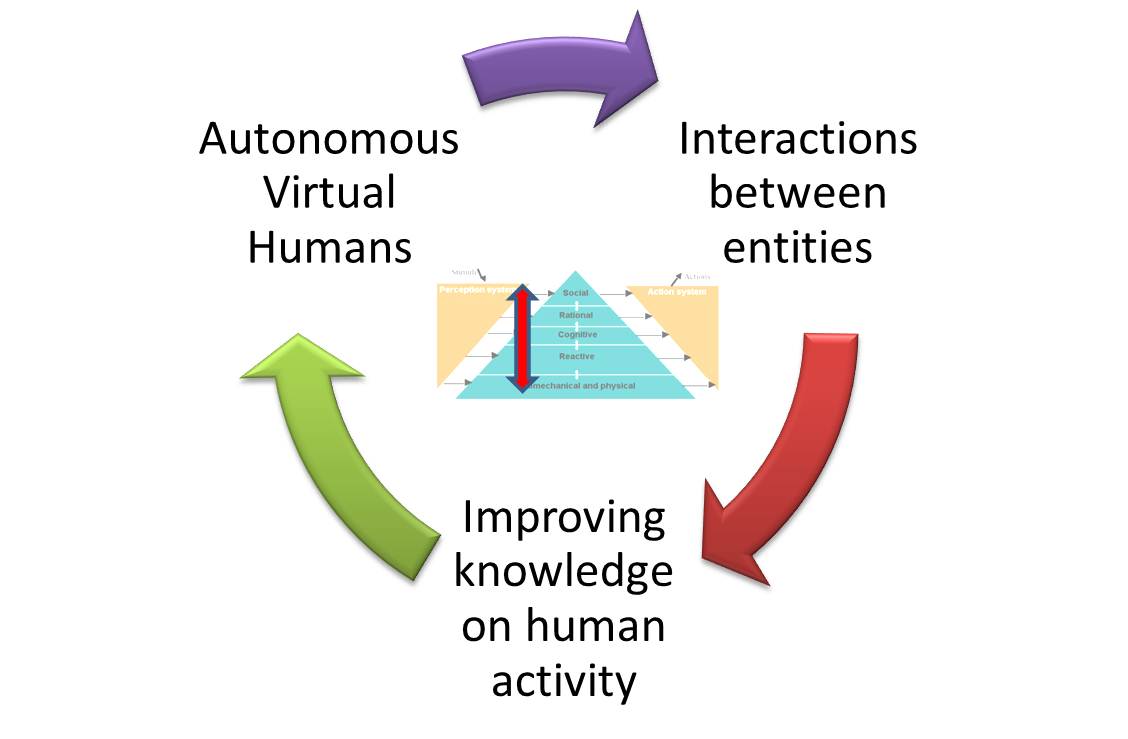
In this research path, improving knowledge on human activity enables us to highlight fundamental assumptions about natural control of human activities. These contributions can be promoted in biomechanics, motion sciences, neurosciences, etc. According to these assumptions we propose new algorithms for controlling autonomous virtual humans. The virtual humans can perceive their environment and decide of the most natural action to reach a given goal. This work is promoted in computer animation, virtual reality and has some applications in robotics through collaborations. Once autonomous virtual humans have the ability to act as real humans should do in the same situation, it is possible to make them interact with other autonomous characters (for crowds or group simulations) and with real users. The key idea here is to analyze to what extent the assumptions proposed at the first stage lead to natural interactions with real users. This process enables the validation of both our assumptions and our models.
Among all the problems and challenges described above, MimeTIC focuses on the following domains of research:
motion sensing which is a key issue to extract information from raw motion capture systems and thus to propose assumptions on how people control their activity,
human activity & virtual reality, which is explored through sports application in MimeTIC, enables us to design new methods for analyzing the perception-action coupling in human activity, and to validate whether the autonomous characters lead to natural interactions with users,
crowds and groups simulation which is dedicated to model the interactions in small groups of individuals and to see how to extend to larger groups, such as crowds with lot of individual variability,
virtual storytelling which enables us to design and simulate complex scenarios involving several humans who have to satisfy numerous complex constraints (such as adapting to the real-time environment in order to play an imposed scenario), and to design the coupling with the camera scenario to provide the user with a real cinematographic experience,
biomechanics which is essential to offer autonomous virtual humans who can react to physical constraints in order to reach high-level goals, such as maintaining balance in dynamic situation or selecting a natural motor behavior among all the theoretical solution space for a given task,
and autonomous characters which is a transversal domain that can reuse the results of all the other domains to make these heterogeneous assumptions and models provide the character with natural behaviors and autonomy.