Section: New Results
Robot Multimodal Learning of Language and Action
Learning semantic components from sub-symbolic multi-modal perception
Participants : Olivier Mangin, Caio Tomazelli Da Silva Oliveira, Pierre-Yves Oudeyer.
Perceptual systems often include sensors from several modalities. However, existing robots do not yet sufficiently discover patterns that are spread over the flow of multimodal data they receive. In this work we establish a framework to learns multimodal components from perception. We use a nonnegative matrix factorization algorithm to learn a dictionary of components that represent meaningful elements present in the multimodal perception, without providing the system with a symbolic representation of the semantics. In [53] we illustrate this framework by showing how a learner discovers word-like components from observation of gestures made by a human together with spoken descriptions of the gestures, and how it captures the semantic association between the two. These experiments were further extended during the internship of Caio Tomazelli Da Silva Oliveira. Importantly these experiments provide an example of language grounding into perception, and feature global understanding of a linguistic task without requiring its compositional understanding. The code of the experiments from [53] as well as the motion dataset have been made publicly available to improve the reproducibility of the experiments.
Curiosity-driven exploration and interactive learning of visual objects with the ICub robot
Participants : Mai Nguyen, Natalia Lyubova, Damien Gerardeaux-Viret, David Filliat, Pierre-Yves Oudeyer.
We studied how various mechanisms for cognition and learning, such as curiosity, action selection, imitation, visual learning and interaction monitoring, can be integrated in a single embodied cognitive architecture. We have conducted an experiment with the iCub robot for active recognition of objects in 3D through curiosity-driven exploration, in which the robot can manipulate the robot or ask a human user to manipulate objects to gain information and recognise better objects (fig. 27 ). For this experiment carried out within the MACSi project, we address the problem of learning to recognise objects in a developmental robotics scenario. In a life-long learning perspective, a humanoid robot should be capable of improving its knowledge of objects with active perception. Our approach stems from the cognitive development of infants, exploiting active curiosity-driven manipulation to improve perceptual learning of objects. These functionalities are implemented as perception, control and active exploration modules as part of the Cognitive Architecture of the MACSi project. We integrated a bottom-up vision system based on swift feature points and motor-primitive based robot control with the SGIM-ACTS algorithm (Socially Guided Intrinsic Motivation with Active Choice of Task and Strategy as the active exploration module. SGIM-ACTS is a strategic learner who actively chooses which task to concentrate on, and which strategy is better according to this task. It thus monitors the learning progress for each strategy on all kinds of tasks, and actively interacts with the human teacher. We obtained an active object recognition approach, which exploits curiosity to guide exploration and manipulation, such that the robot can improve its knowledge of objects in an autonomous and efficient way. Experimental results show the effectiveness of our approach: the humanoid iCub is now capable of deciding autonomously which actions must be performed on objects in order to improve its knowledge, requiring a minimal assistance from its caregiver. This work constitutes the base for forthcoming research in autonomous learning of affordances. This work have been published in a conference [57] and in a journal paper [28] .
Imitation Learning and Language
Participants : Thomas Cederborg, Pierre-Yves Oudeyer.
We have studied how context-dependant imitation learning of new skills and language learning could be seen as special cases of the same mechanism. We argue that imitation learning of context-dependent skills implies complex inferences to solve what we call the ”motor Gavagai problem”, which can be viewed as a generalization of the so-called ”language Gavagai problem”. In a full symbolic framework where percepts and actions are continuous, this allows us to articulate that language may be acquired out of generic sensorimotor imitation learning mechanisms primarily dedicated at solving this motor Gavagai problem. Through the use of a computational model, we illustrate how non-linguistic and linguistic skills can be learnt concurrently, seamlessly, and without the need for symbols. We also show that there is no need to actually represent the distinction between linguistic and non-linguistic tasks, which rather appears to be in the eye of the observer of the system. This computational model leverages advanced statistical methods for imitation learning, where closed-loop motor policies are learnt from human demonstrations of behaviours that are dynamical responses to a multimodal context. A novelty here is that the multimodal context, which defines what motor policy to achieve, includes, in addition to physical objects, a human interactant which can produce acoustic waves (speech) or hand gestures (sign language). This was published in [26] .
Learning to Interpret the Meaning of Teaching Signals in Socially Guided Robot Learning
Participants : Manuel Lopes, Jonathan Grizou, Thomas Cederborg, Pierre-Yves Oudeyer.
We elaborated an algorithm to bootstrap shared understanding in a human-robot interaction scenario where the user teaches a robot a new task using teaching instructions yet unknown to it. In such cases, the robot needs to estimate simultaneously what the task is and the associated meaning of instructions received from the user. For this work, we consider a scenario where a human teacher uses initially unknown spoken words, whose associated unknown meaning is either a feedback (good/bad) or a guidance (go left, right, ...). We present computational results, within an inverse reinforcement learning framework, showing that a) it is possible to learn the meaning of unknown and noisy teaching instructions, as well as a new task at the same time, b) it is possible to reuse the acquired knowledge about instructions for learning new tasks, and c) even if the robot initially knows some of the instructions' meanings, the use of extra unknown teaching instructions improves learning efficiency. Published articles: [43] , [45] .
An extension to the use of brain signals has been made [44] . Do we need to explicitly calibrate Brain Machine Interfaces (BMIs)? Can we start controlling a device without telling this device how to interpret brain signals? Can we learn how to communicate with a human user through practical interaction? It sounds like an ill posed problem, how can we control a device if such device does not know what our signals mean? This paper argues and present empirical results showing that, under specific but realistic conditions, this problem can be solved. We show that a signal decoder can be learnt automatically and online by the system under the assumption that both, human and machine, share the same a priori on the possible signals' meanings and the possible tasks the user may want the device to achieve. We present results from online experiments on a Brain Computer Interface (BCI) and a Human Robot Interaction (HRI) scenario.
Active Learning for Teaching a Robot Grounded Relational Symbols
Participants : Johannes Kulick, Tobias Lang, Marc Toussaint, Manuel Lopes.
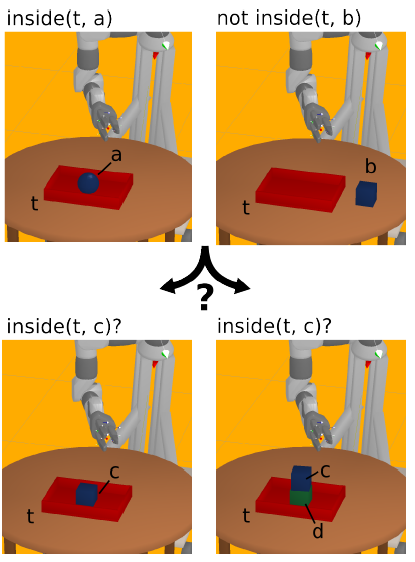
The present work investigates an interactive teaching scenario, where a human aims to teach the robot symbols that abstract geometric (relational) features of objects. There are multiple motivations for this scenario: First, state-of-the-art methods for relational Reinforcement Learning demonstrated that we can successfully learn abstracting and well-generalizing probabilistic relational models and use them for goal-directed object manipulation. However, these methods rely on given grounded action and state symbols and raise the classical question Where do the symbols come from? Second, existing research on learning from human-robot interaction has focused mostly on the motion level (e.g., imitation learning). However, if the goal of teaching is to enable the robot to autonomously solve sequential manipulation tasks in a goal-directed manner, the human should have the possibility to teach the relevant abstractions to describe the task and let the robot eventually leverage powerful relational RL methods (see Figure 33 ). We formalize human-robot teaching of grounded symbols as an Active Learning problem, where the robot actively generates geometric situations that maximize his information gain about the symbol to be learnt. We demonstrate that the learned symbols can be used in a relational RL framework for the robot to learn probabilistic relational rules and use them to solve object manipulation tasks in a goal-directed manner. [47] .