

Section: New Results
Robot Design and Morphological Computation
The Poppy Humanoid Robot: Leg Design for Biped Locomotion
Participants : Matthieu Lapeyre, Pierre Rouanet, Pierre-Yves Oudeyer.
In this paper introduced for Poppy as a novel humanoid robotic platform designed to jointly address three central goals of humanoid robotics: 1) study the role of morphology in biped locomotion; 2) study full-body compliant physical human-robot interaction; 3) be robust while easy and fast to duplicate to facilitate experimentation. The taken approach relies on functional modeling of certain aspects of human morphology, optimizing materials and geometry, as well as on the use of 3D printing techniques. In this article, we have focused on the presentation of the design of specific morphological parts related to biped locomotion: the hip, the thigh, the limb mesh and the knee. We also presented an initial experiments showing properties of the robot when walking with the physical guidance of a human. [50] .
Poppy Humanoid Platform: Experimental Evaluation of the Role of a Bio-inspired Thigh Shape
Participants : Matthieu Lapeyre, Pierre Rouanet, Pierre-Yves Oudeyer.
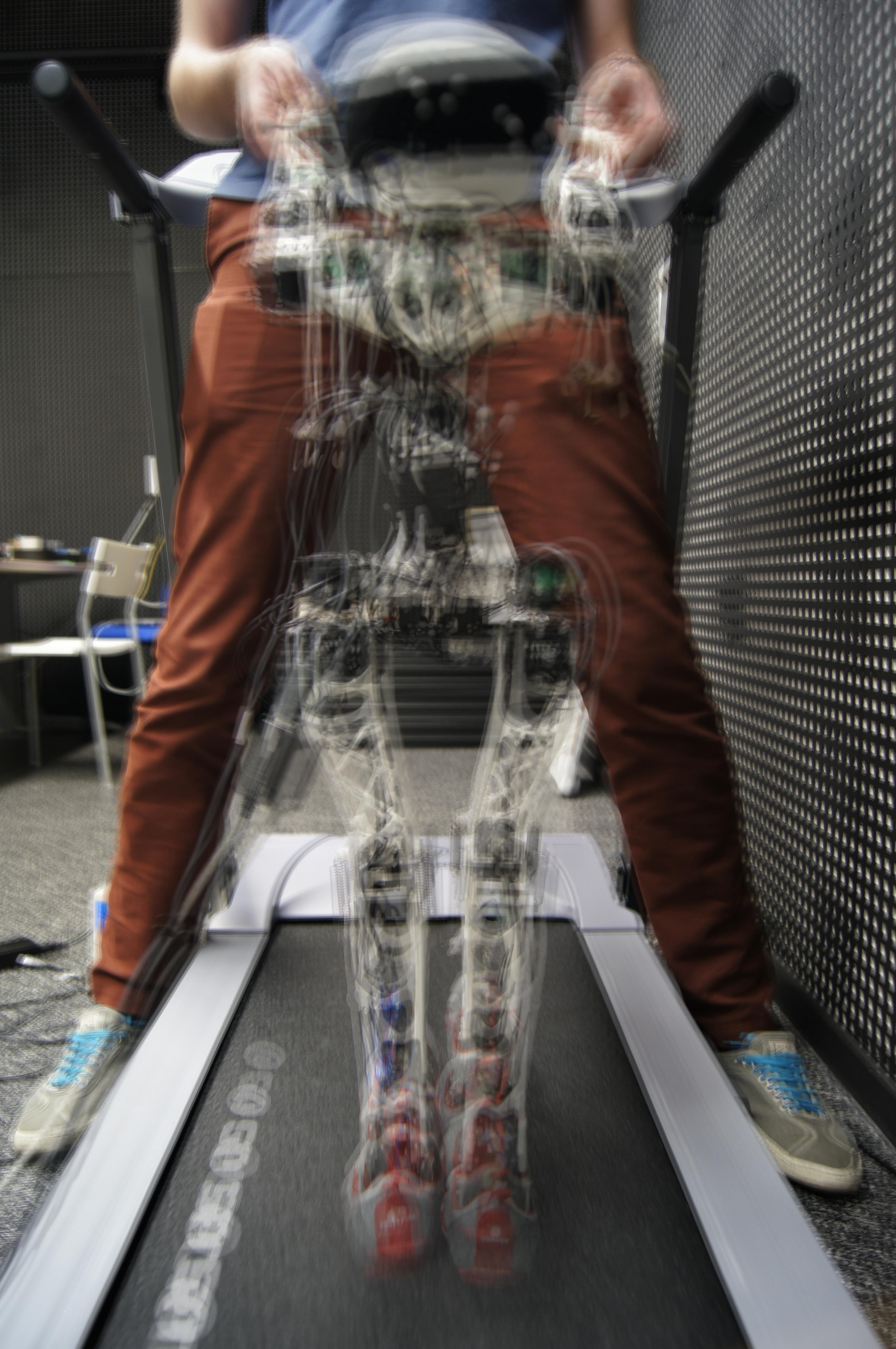
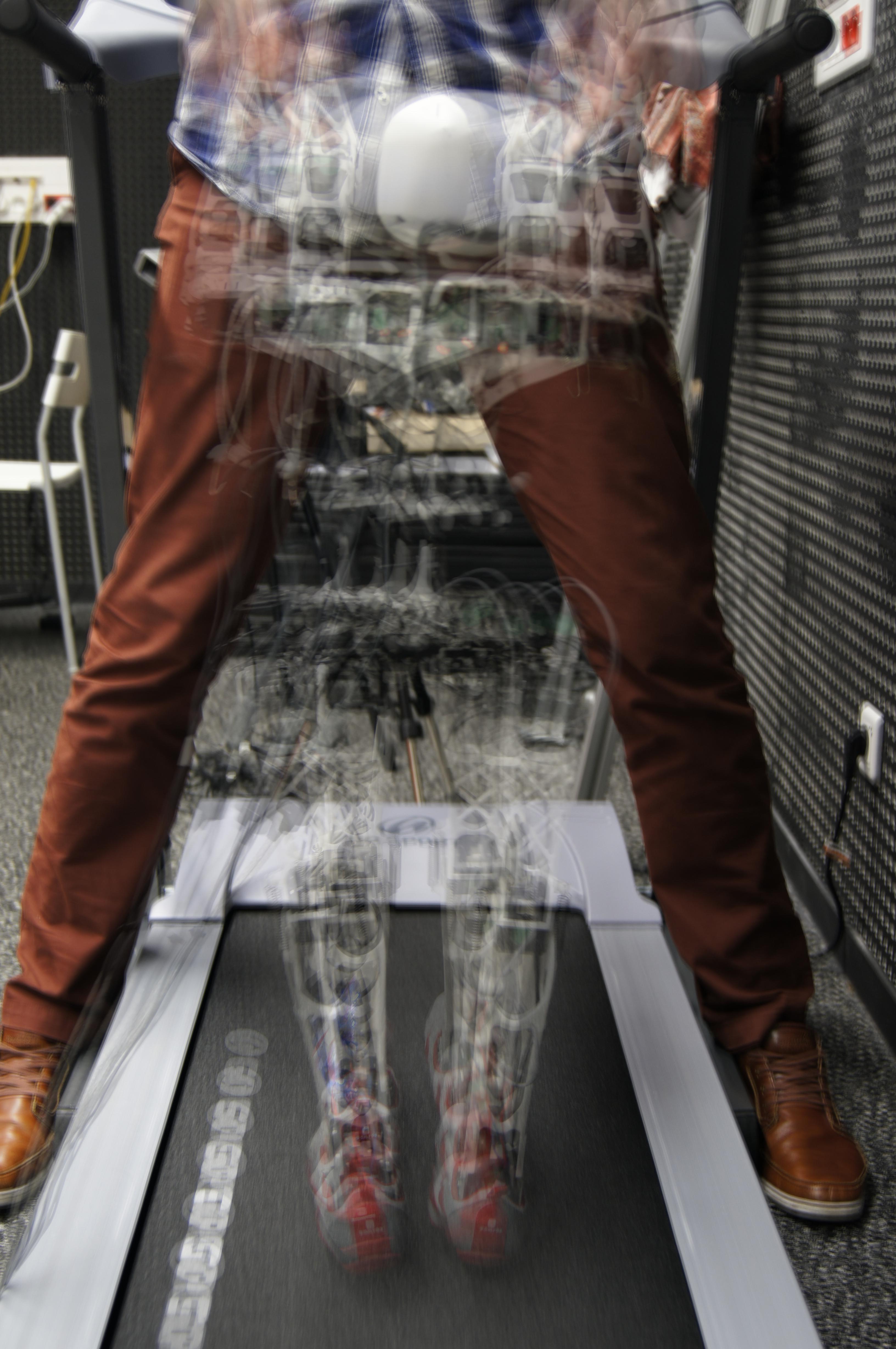
In this paper, we present an experimental evaluation of the role of the morphology in the Poppy humanoid platform. More precisely, we have investigated the impact of the bio-inspired thigh, bended of 6o, on the balance and biped locomotion. We compare this design with a more traditional straight thigh. We describe both the theoretical model and real experiments showing that the bio-inspired thigh allows the reduction of falling speed by almost 60% (single support phase) and the decrease of the lateral motion needed for the mass transfer from one foot to the other by 30% (double support phase). We also present an experiment where the robot walks on a treadmill thanks to the social and physical guidance of expert users and we show that the bended thigh reduces the upper body motion by about 45% indicating a more stable walk.[48] .
|
Morphological computation and body intelligence
Comparative Study of the Role of Trunk in Human and Robot Balance Control
Participants : Matthieu Lapeyre [correspondant] , Christophe Halgand, Jean-Renã© Cazalet, Etienne Guillaud, Pierre-Yves Oudeyer.
Numerous studies in the field of functional motor rehabilitation were devoted to understanding the functioning of members but few are interested in the coordination of the trunk muscles and the relationship between axial and appendicular motricity which is essential in maintaining balance during travel. Acquiring new knowledge on this subject is a prerequisite in the development of new therapeutic strategies to restore motor function to the overall development of robotic orthosis that would assist the movement. Many robotic orthosis using EMG signals were unfortunately using few joints [82] and a system for controlling a multi articulated spine has not yet been developed. We propose here to use a multidisciplinary approach to define the neuro-mechanical principles where an axial system is operating in synergy with human and robot limbs.
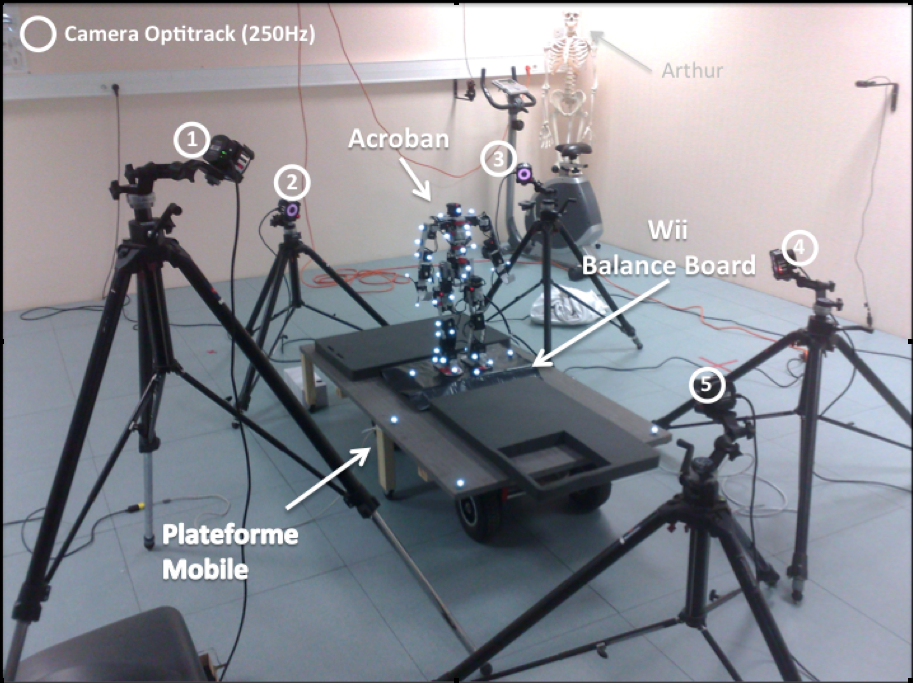
To bring us a theoretical framework, we chose to study the reactions of the Acroban humanoid robot. Including 5 joints in the trunk, Acroban can reproduce in part the fluid movements of the human body [101] and especially to test its behavior when its trunk is held fixed or his arms are no longer used for rebalance. To disrupt postural balance in humans and robots, we have developed a low cost mobile platform (see Figure 35 ). This platform is made up of a broad stable support mounted on a skateboard having a power of 800W. The substitution of the initial order of skate by an embedded microcontroller allows us to generate mono-axial perturbations precise intensity and duration to ensure repeatability of the disturbance. We capture movements (Optitrack 250Hz) and record the acceleration of the platform (accelerometer embedded 2kHz), the center of pressure (WiiBalanceBoard 60Hz), and electromyography (EMG).
|
The experimental device (mobile platform and synchronized recordings) is operational. Preliminary experiments have allowed us to refine the profiles of disturbance on the robot Acroban. The analysis of preliminary results is in progress. Following this study, we hope to improve the modeling of the motor system in humans and robotic simulation as a basis for the development of robotic orthosis axial system. Second, the results provide a basis for improved balancing of Acroban primitives but also the development of future humanoid robots.