

Section: Software and Platforms
Datasets
Choreography dataset 1 and 2
Participants : Olivier Mangin [correspondant] , Haylee Fogg.
These databases contain choreography motions recorded through a kinect device. In the first dataset, these motions have a combinatorial structure: from a given set of primitive dance motions, choreographies are constructed as simultaneous execution of some of these primitive motions. Primitive dance motions are chosen from a total set of 48 motions and are spanned over one or two limbs, either the legs (e.g. walk, squat), left or right arm (e.g. wave hand, punch) or both arms (e.g. clap in hands, paddle). Complex choreographies are produced as the simultaneous demonstration of two or three of these primitive motion: either one for legs and one for both arm, or one for legs and one for each arm. The dataset has been used in the experiments from [104] for studying learning techniques allowing to identify dictionaries of motion primitives, and is publicly available at https://flowers.inria.fr/choreography_database.html .
The second dataset only contains choreographies composed of a single motion. It contains 110 records of each gesture from a set of 10 simple gestures and was used in the experiments from [53] . The dataset is publicly available at https://flowers.inria.fr/choreo2 .
Development on NoFish Platform
Participants : Paul Fudal [correspondant] , Sao Mai Nguyen.
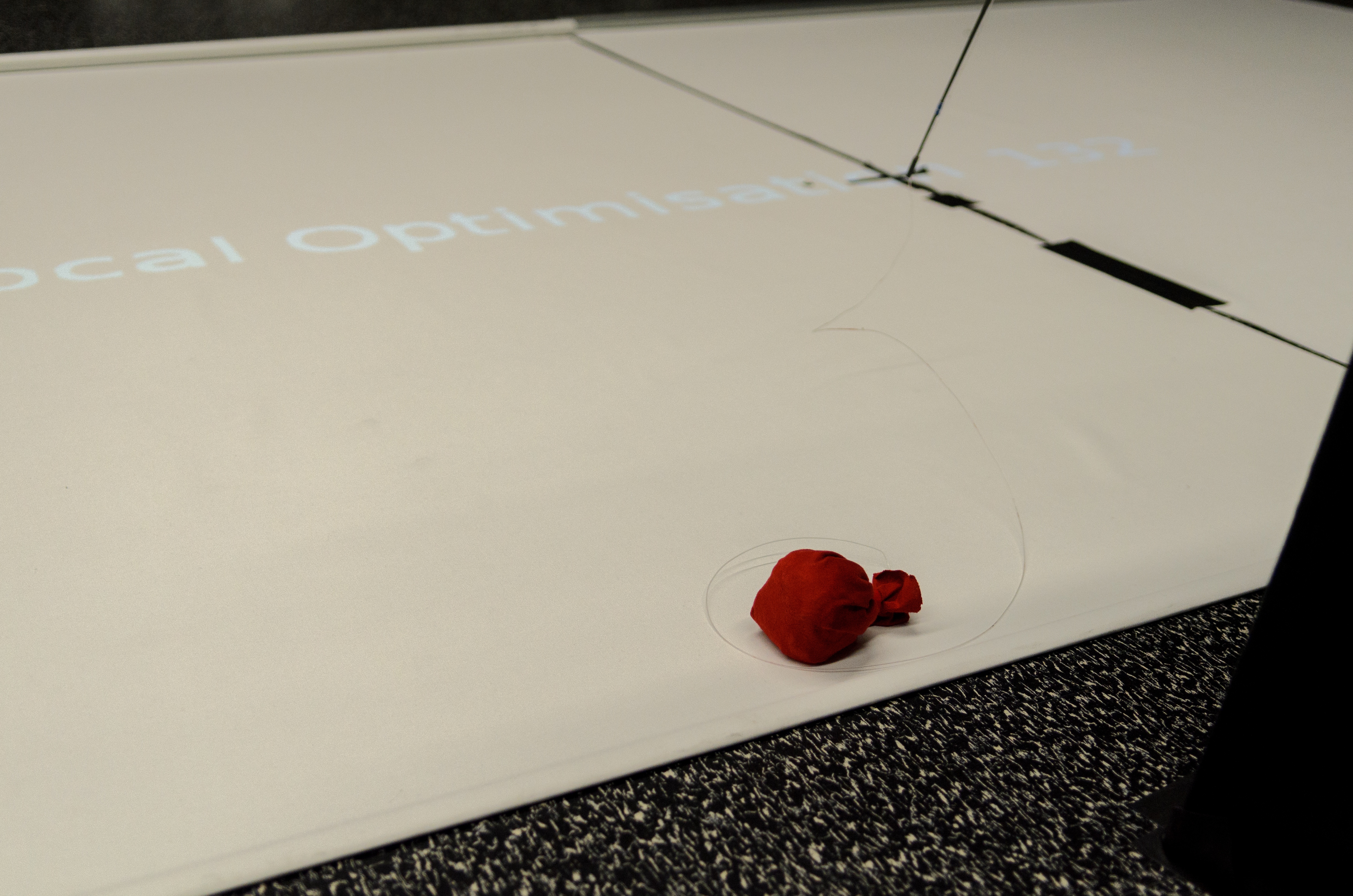
NoFish (fig. 2 ) platform is a setup used by Mai Nguyen to perform severals experiments following her PhD work on social learning and intrinsic motivation. The setup consists to an ErgoRobot (fig. 3 ) with a fishing rod attached to the tip and a cap made with a red juggling ball. The robot is plugged on an ethernet power-switch used to turn it off if something wrong happens with the robot (for example : the robot try to go in a position he cannot reach and its motors are forcing too much). Tracking the cap is made with Full HD camera on the ceiling. At last, a video-projector prints informations on the floor (fig. 4 ) which helps for interactions between humans and the robots.
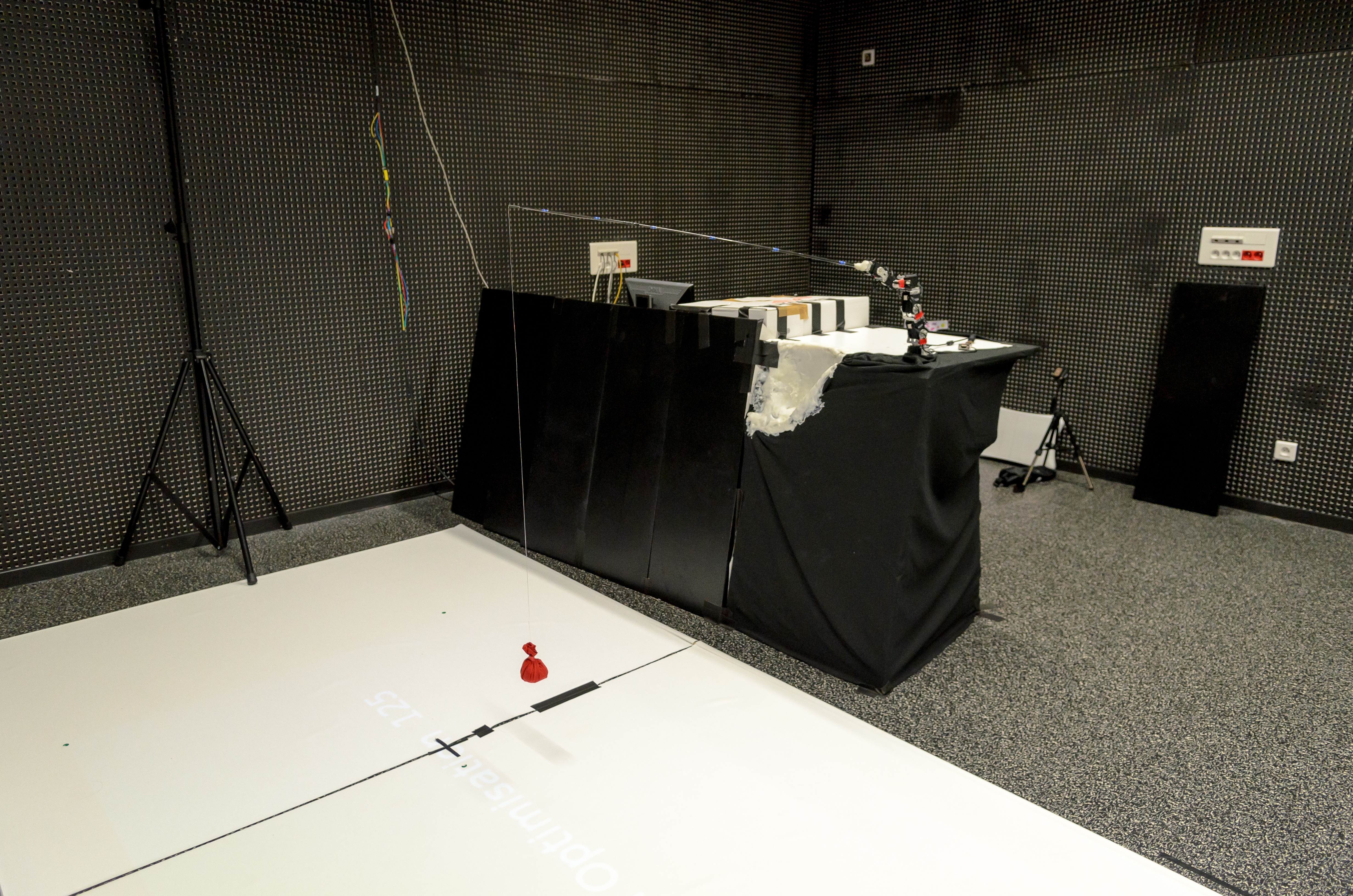
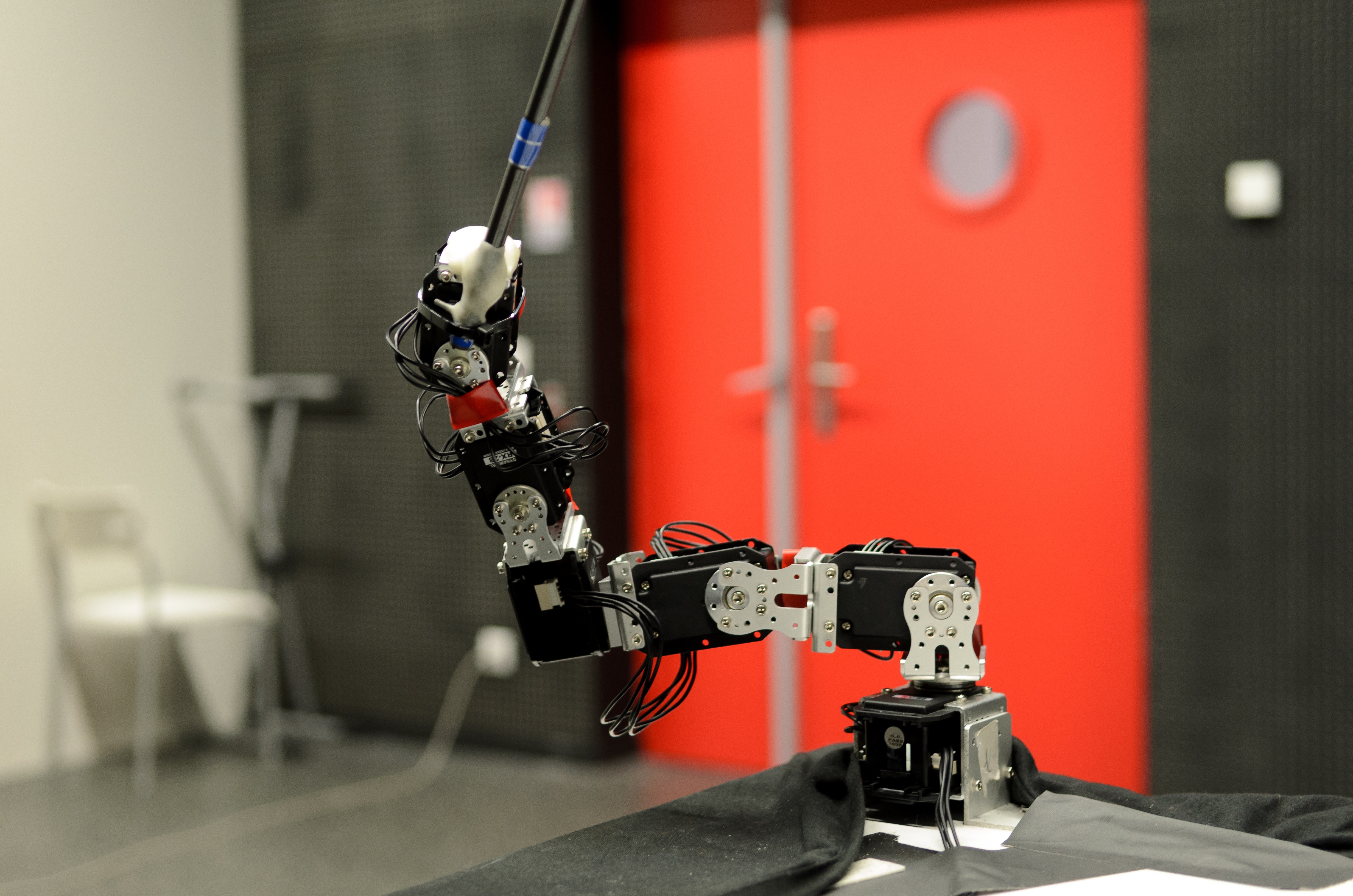
Controlling the robot is made using URBI (http://www.gostai.com/products/jazz/urbi/ ) scripts allowing different control level from single motor control to pre-programmed primitive (for example : reseting the robot or make it going to its starting position). URBI is also used to perform action through the power-switch if the robot must be turned off.
Tracking the cap is made by a program written using OpenCV and keep up to date the cap's coordinates by sending them to URBI through a network socket.
An other program written in JAVA and Processing (http://processing.org ) allows to print informations on the floor; it consists of a server receiving through a network socket texts and shapes informations to print on the floor and a JAVA object which can be used with compatible software. This component where really useful for giving simple and direct information during an experiment and also during interaction between a human and the robot for socially guided experiments.
The main program is written in Matlab and includes all the explained previous components and softwares. It also includes a forward kinematic calculation module used to ensure a movement sent can be safely be played by the robot to avoid it breaking himself; this module gives step by step informations of what will happen when the robot will play the movement like, for example, if the fishing cap will touch the floor at the end or not which permits to keep the robot safe and speed up experiments by ignoring dangerous moves for the robot and useless ones for the deployed algorithm.
This setup were used by Sao Mai Nguyen to run experiments during her thesis on social learning and intrinsic motivation