Section: Software and Platforms
Medical robotics platforms
Participants : Fabien Spindler [correspondant] , Alexandre Krupa.
This testbed is of primary interest for researches and experiments concerning ultrasound visual servoing applied to positioning or tracking tasks described in Section 6.4 .
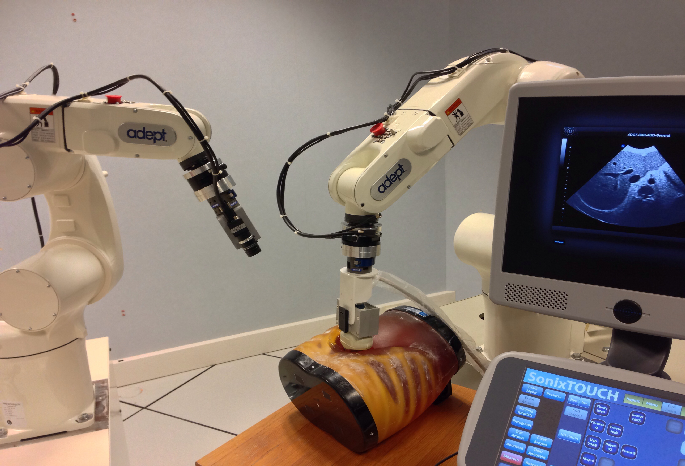
This platform is composed by two Adept Viper six degrees of freedom arms (see Fig. 3 ). Ultrasound probes connected either to a SonoSite 180 Plus or an Ultrasonix SonixTouch imaging system can be mounted on a force torque sensor attached to each robot end-effector.
We started experimentation to validate needle detection and tracking under ultrasound imaging (see Section 6.4.1 ).
This year, two papers enclose experimental results obtained with this platform.