Section: Software and Platforms
Mobile robotics platforms
Participants : Fabien Spindler [correspondant] , Erwan Demairy, Marie Babel, Patrick Rives.
Indoors mobile robots
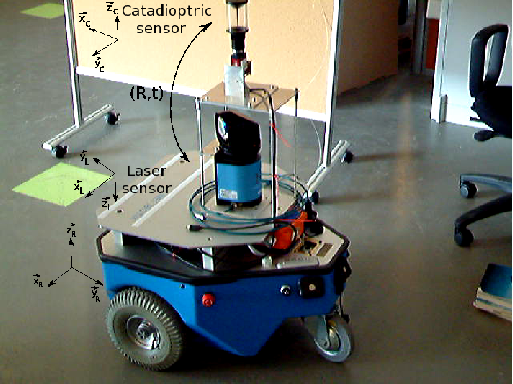
For fast prototyping of algorithms in perception, control and autonomous navigation, the team uses Hannibal in Sophia Antipolis, a cart-like platform built by Neobotix (see Fig. 4 .a), and a Pioneer 3DX from Adept in Rennes (see Fig. 4 .b) as well as a Robotino from Festo. These platforms are equipped with various sensors needed for Slam purposes, autonomous navigation and sensor-based control.
Moreover, to validate the researches in personally assisted living topic (see 6.3.4 ), we bought in Rennes a six wheel electric wheelchair from Penny and Giles Drives Technology (see Fig. 4 .c). The control of the wheelchair is performed using a plug and play system between the joystick and the low level control of the wheelchair. Such a system let us acquire the user intention through the joystick position and control the wheelchair by applying corrections to its motion. The wheelchair has been fitted with cameras to perform the required servoing for assisting handicapped people. Moreover, to ensure the direct security of the user, seven infrared proximity sensors have been installed all around the wheelchair.
Note that three papers exploiting the indoors mobile robots were published this year.
Outdoors mobile robots
The team exploits also Cycab urban electrical cars (see Figs. 4 .d and 4 .e). Two vehicles in Sophia Antipolis and one in Rennes are instrumented with cameras and range finders to validate researches in the domain of intelligent urban vehicle. Cycabs were used as experimental testbeds in several national projects.
Three papers published by Lagadic in 2013 enclose experimental results obtained with these outdoors mobile robots.
Technological Development Action (ADT) P2N
The ADT P2N aims at sharing existing and in development codes between the Lagadic and E-Motion teams in the field of autonomous navigation of indoors robots. These codes are also used in the platforms involved in the large-scale initiative action PAL (Personnally Assisted Living, see Section 8.2.6 ). This year, the most notable activities for this ADT have been to:
-
adapt a navigation module developed by E-Motion to the mobile platform used at Sophia-Antipolis;
-
make the SLAM module developed by Lagadic usable by the E-Motion navigation module;
-
develop the core architecture running under ROS supporting the different sensors and platforms available in Sophia-Antipolis.