

Section: New Results
Visual navigation of mobile robots
New RGB-D sensor design for indoor 3D mapping
Participants : Eduardo Fernandez Moral, Patrick Rives.
A multi-sensor device has been developed for omnidirectional RGB-D (color+depth) image acquisition (see Figure 5 .a). This device allows acquiring such omnidirectional images at high frame rate (30 Hz). This approach has advantages over other alternatives used nowadays in terms of accuracy and real-time spherical image construction of indoor environments, which are of particular interest for mobile robotics. This device has important prospective applications, such as fast 3D-reconstruction or simultaneous localization and mapping (SLAM). A novel calibration method for such device has been developed. It does not require any specific calibration pattern, taking into account the planar structure of the scene to cope with the fact that there is no overlapping between sensors. A method to perform image registration and visual odometry has also been developed. This method relies in the matching of planar primitives that can be efficiently obtained from the depth images. This technique performs considerably faster than previous registration approaches based on ICP.
Long term mapping
Participants : Tawsif Gokhool, Patrick Rives.
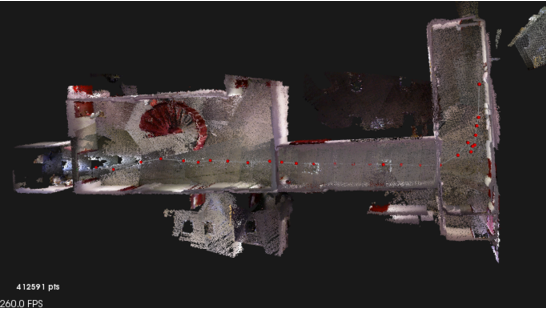
This work inscribes in the context of lifelong navigation and map building. The kind of representation that we focus on is made up of a topometric map consisting of a graph of spherical RGB-D views. Thanks to the use of a saliency map built from the photometric and geometric data, we are able to characterize the conditioning of the pose estimation algorithm and to keep as keyframes only a subset of the spherical RGB-D views acquired on the fly. Subsequently, a study on the spread of keyframes was made. The aim was to investigate ways of covering completely and optimally the explored environment in a pose graph representation. Again, over here, the benefits are twofold. Firstly, data acquisition at a throttle of 30 Hz induces many redundant information in the database, which may not necessarily contribute much to the registration phase. Therefore, intelligent selection of keyframes helped in the reduction of data redundancy. Furthermore, as pointed out in the literature, frame to keyframe alignment has the advantage of reducing trajectory drift since the propagation error is diminished as well (see Figure 5 .b)
|

Semantic mapping
Participants : Romain Drouilly, Patrick Rives.
Semantic mapping aims at building rich cognitive representations of the world in addition to classical topometric maps. A dense labeling has been achieved from high resolution outdoor images using an approach combining Random Forest (RF) and Conditional Random Field (CRF). A second development dealt with the use of semantic information for localization in indoor scenes. For this kind of scenes dense labeling is more difficult due to the large number of potential classes. Therefore algorithms developed for this task rely on a sparse representation of indoor environments called “pbmap”. It consists of a graph whose nodes are the planes present in a given scene. These planes are the only parts of the scene that are labeled. Very high labeling rates of planes has been reached (more than 90%) and it has been shown that these labeled planes could be useful for localization and navigation tasks.
Automous navigation of wheelchairs
Participants : Rafik Sekkal, François Pasteau, Marie Babel.
The goal of this work is to design an autonomous navigation framework of a wheelchair by means of a single camera and visual servoing. We focused on a corridor following task where no prior knowledge of the environment is required. The servoing process matches the non-holonomic constraints of the wheelchair and relies on two visual features, namely the vanishing point location and the orientation of the median line formed by the straight lines related to the bottom of the walls [60] . This overcomes the initialization issue typically raised in the literature. The control scheme has been implemented onto a robotized wheelchair and results show that it can follow a corridor with an accuracy of cm [50] . This study is in the scope of the Inria large-scale initiative action PAL (see Section 8.2.6 ) as well as of the Apash project (see Section 8.1.2 ).
Semi-autonomous control of a wheelchair for navigation assistance along corridors
Participants : Marie Babel, François Pasteau, Alexandre Krupa.
This study concerns a semi-autonomous control approach that we designed for safe wheelchair navigation along corridors. The control relies on the combination of a primary task of wall avoidance performed by a dedicated visual servoing framework and a manual steering task. A smooth transition from manual driving to assisted navigation is obtained thanks to a gradual visual servoing activation method that guarantees the continuity of the control law. Experimental results clearly show the ability of the approach to provide an efficient solution for wall avoiding purposes. This study is in the scope of the Inria large-scale initiative action PAL (see Section 8.2.6 ) as well as of the Apash project (see Section 8.1.2 ).
Target tracking
Participants : Ivan Markovic, François Chaumette.
This study was realized in the scope of the FP7 Regpot Across project (see Section 8.3.1.2 ) during the three-month visit of Ivan Markovic, Ph.D. student at the Unviersity of Zagreb. It consisted in developing a pedestrian visual tracking from an omni-directional fish-eye camera and a visual servoing control scheme so that a mobile robot is able to follow the pedestrian. This study has been validated on our Pioneer robot (see Section 5.5 ).
Obstacle avoidance
Participants : Fabien Spindler, François Chaumette.
This study was realized in collaboration with Andrea Cherubini who is now Assistant Prof. at Université de Montpellier. It is concerned with our long term researches about visual navigation from a visual memory without any accurate 3D localization [9] . In order to deal with obstacle avoidance while preserving the visibility in the visual memory, we have proposed a control scheme based on tentacles for fusing the data provided by a pan-tilt camera and a laser range sensor [14] . Recent progresses have been obtained by considering moving obstacles [39] .