

Section: New Results
Inverse problems
Sparse BRDF Approximation using Compressive Sensing
Participants : Zupancic Benoit, Soler Cyril.
BRDF acquisition is a tedious operation, since it requires measuring 4D data. On one side of the spectrum lie explicit methods, which perform many measurements to potentially produce very accurate reflectance data after interpolation. These methods are generic but practically difficult to setup and produce high volume data. On the other side, acquisition methods based on parametric models implicitly reduce the infinite dimensionality of the BRDF space to the number of parameters, allowing acquisition with few samples. However, parametric methods require non linear optimization. They become unstable when the number of parameters is large, with no guaranty that a given parametric model can ever fit particular measurements.
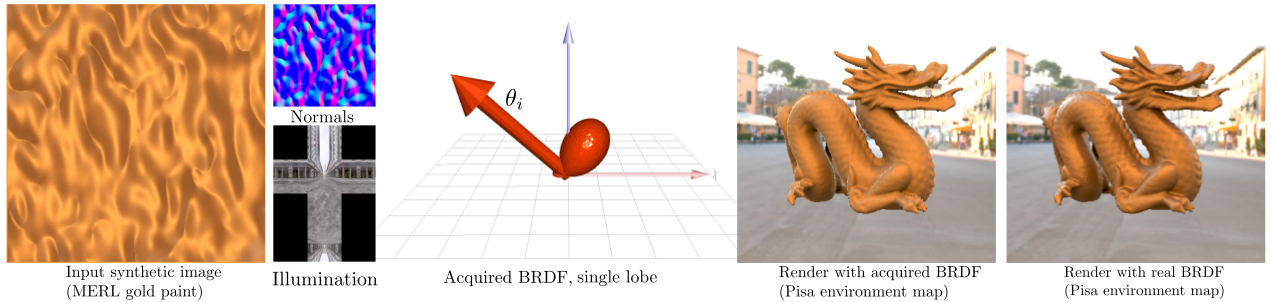
We experiment a new acquisition method where the measurement of the BRDF is performed from a single image, knowing the normals and illumination. To tackle such a severely underconstrained problem, we express the BRDF in a high dimensional basis, and perform the reconstruction using compressive sensing, looking for the most sparse solution to the linear problem of fitting the measurement image. Doing so, we leverage the coherency between the measured pixels, while keeping the high dimension of the space the BRDF is searched into.
This work is a very first attempt at reconstructing BRDFs using compressive sensing. In Fig 18 we used a synthetic input image, for the sake of checking the feasibility of the recovery algorithm, in the particular case of an isotropic spatially constant BRDFs. The possibility to extend our theory to non spatially varying and anisotropic BRDFs is currently under investigation. We would like to orient our work toward BRDF acquisition with consumer hardware. In particular, our preliminary results indicate that compressive sensing could achieve an very accurate acquisition with additional input, such as a video of a static object under probed lighting.
This word has been published as a poster to the Siggraph Asia'2013 conference [24] .
|
Floating tangents for approximating spatial curves with G1 piecewise helices
Participants : Derouet-Jourdan Alexandre, Bertails-Descoubes Florence, Thollot Joëlle.
Curves are widely used in computer science to describe real-life objects such as slender deformable structures. Using only 3 parameters per element, piecewise helices offer an interesting and compact way of representing digital curves. In our work [7] , we present a robust and fast algorithm to approximate Bezier curves with G1 piecewise helices. Our approximation algorithm takes a Bezier spline as input along with an integer N and returns a piecewise helix with N elements that closely approximates the input curve. The key idea of our method is to take N+1 evenly distributed points along the curve, together with their tangents, and interpolate these tangents with helices by slightly relaxing the points. Building on previous work, we generalize the proof for Ghosh's co-helicity condition, which serves us to guarantee the correctness of our algorithm in the general case. Finally, we demonstrate both the efficiency and robustness of our method by successfully applying it to various datasets of increasing complexity, ranging from synthetic curves created by an artist to automatic image-based reconstructions of real data such as hair, heart muscular fibers or magnetic field lines of a star.
Inverse Dynamic Hair Modeling with Frictional Contact
Participants : Derouet-Jourdan Alexandre, Daviet Gilles, Bertails-Descoubes Florence, Thollot Joëlle.
In the latest years, considerable progress has been achieved for accurately acquiring the geometry of human hair, thus largely improving the realism of virtual characters. In parallel, rich physics-based simulators have been successfully designed to capture the intricate dynamics of hair due to contact and friction. However, at the moment there exists no consistent pipeline for converting a given hair geometry into a realistic physics-based hair model. Current approaches simply initialize the hair simulator with the input geometry in the absence of external forces. This results in an undesired sagging effect when the dynamic simulation is started, which basically ruins all the efforts put into the accurate design and/or capture of the input hairstyle. In this work [6] we propose the first method which consistently and robustly accounts for surrounding forces — gravity and frictional contacts, including hair self-contacts — when converting a geometric hairstyle into a physics-based hair model. Taking an arbitrary hair geometry as input together with a corresponding body mesh, we interpret the hair shape as a static equilibrium configuration of a hair simulator, in the presence of gravity as well as hair-body and hair-hair frictional contacts. Assuming that hair parameters are homogeneous and lie in a plausible range of physical values, we show that this large underdetermined inverse problem can be formulated as a well-posed constrained optimization problem, which can be solved robustly and efficiently by leveraging the frictional contact solver of the direct hair simulator. Our method was successfully applied to the animation of various hair geometries, ranging from synthetic hairstyles manually designed by an artist to the most recent human hair data automatically reconstructed from capture.