

Section: New Results
People detection using RGB-D cameras
Participants : Anh-Tuan Nghiem, François Brémond.
keywords: people detection, HOG, RGB-D cameras
With the introduction of low cost RGB-D cameras like Kinect of Microsoft, video monitoring systems have another option for indoor monitoring beside conventional RGB cameras. Comparing with conventional RGB camera, reliable depth information from RGB-D cameras makes people detection easier. Besides that, constructors of RGB-D cameras also provide various libraries for people detection, skeleton detection or hand detection etc. However, perhaps due to high variance of depth measurement when objects are too far from the camera, these libraries only work when people are in the range of 0.5 to around 4.5 m from the cameras. Therefore, for our own video monitoring system, we construct our own people detection framework consisting of a background subtraction, a people classifier, a tracker and a noise removal component as illustrated in figure 21 .
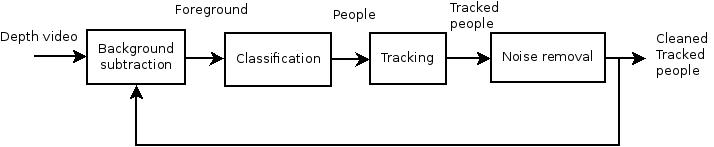
In this system, the background subtraction algorithm is designed specifically for depth data. Particularly, the algorithm employs temporal filters to detect noise related to imperfect depth measurement on some special surface.
The people classification part is the extension of the work in [79] . From the foreground region provided by the background subtraction algorithm, the classification first searches for people head and then extracts HOG like features (Histogram of Oriented Gradient on binary image) above the head and the shoulder. Finally, these features are classified by a SVM classifier to recognise people.
The tracker links detected foreground regions in the current frame with the ones from previous frames. By linking objects in different frames, the tracker provides useful history information to remove noise as well as to improve the sensitivity of the people classifier.
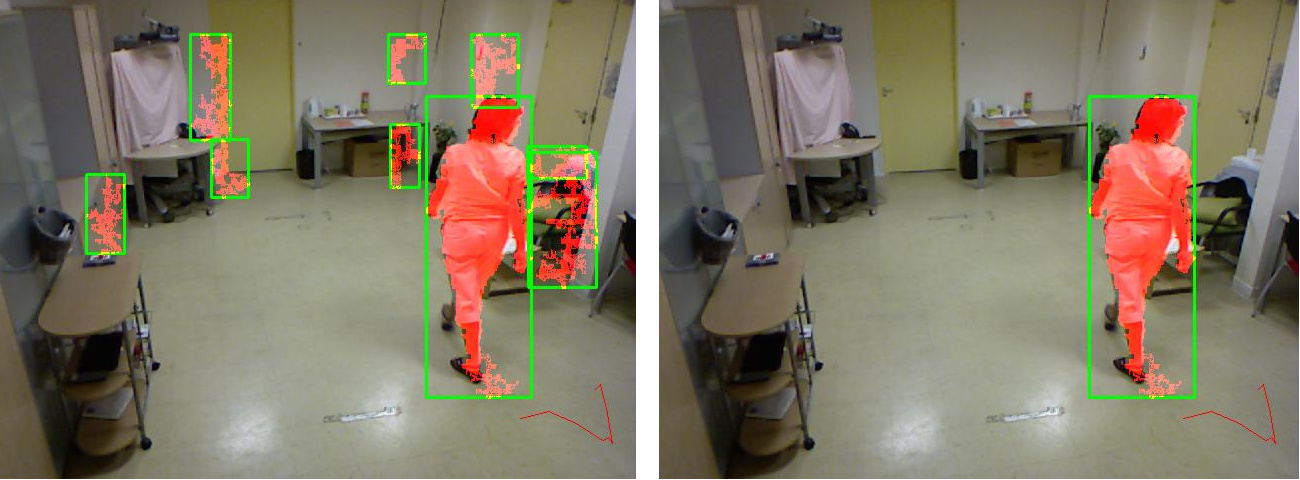
Finally, the noise removal algorithm uses the object history constructed by the tracker to remove two types of noise: noise detected by temporal filter at the background subtraction algorithm and noise from high variance of depth measurement on objects far from the camera. Figure 22 illustrates the performance of noise removal on the detection results.
The overall performance of our people detection framework is comparable to the one provided by Primesense, the constructor of RGB-D camera Microsoft Kinect.
Currently, we are doing extensive evaluation of the framework and the results will be submitted to a conference in the near future.