Section: New Software and Platforms
Mobile robotics platforms
Participants : Fabien Spindler [correspondant] , Marie Babel, Patrick Rives.
Indoor mobile robots
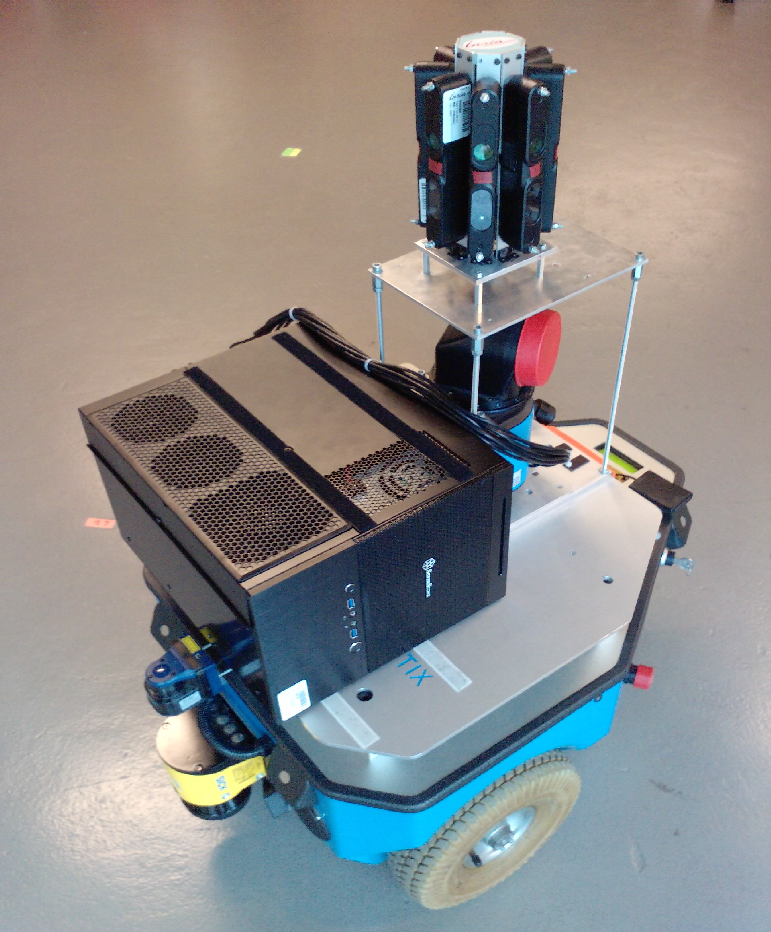
For fast prototyping of algorithms in perception, control and autonomous navigation, the team uses Hannibal in Sophia Antipolis, a cart-like platform built by Neobotix (see Fig. 3 .a), and, in Rennes, a Robotino from Festo (see Fig. 3 .b) and a Pioneer 3DX from Adept (see Fig. 3 .c). These platforms are equipped with various sensors needed for Slam purposes, autonomous navigation and sensor-based control.
Moreover, to validate the researches in personally assisted living topic (see 7.3.3 ), we have in Rennes a six wheel electric wheelchair from Penny and Giles Drives Technology (see Fig. 3 .d) and a five wheel electric wheelchair from You-Q (see Fig. 3 .e). The control of the wheelchair is performed using a plug and play system between the joystick and the low level control of the wheelchair. Such a system lets us acquire the user intention through the joystick position and control the wheelchair by applying corrections to its motion. The wheelchairs have been fitted with cameras and eleven ultrasound sensors to perform the required servoing for assisting handicapped people.
Note that 5 papers exploiting the indoors mobile robots were published this year [14] [22] [28] [56] [27] .
Outdoor vehicles
The team exploits also Cycab urban electrical cars (see Figs. 3 .f and 3 .g). Two vehicles in Sophia Antipolis and one in Rennes are instrumented with cameras and range finders to validate researches in the domain of intelligent urban vehicle. Cycabs were used as experimental testbeds in several national projects in the past. This year we decided to donate the Cycab in Rennes to the INSA engineer school were it started a second live.
The camera rig can also be fixed to a standard car (see Fig. 4 ), which is driven at a variable speed depending on the road/traffic conditions, with an average of 30 km/h and a maximum speed of 80 km/h. The sequences are recorded at a frame rate of 20 Hz, where the six global shutter cameras of the stereo system are synchronized, producing spherical images with a resolution of 2048x665 (see fig. 4 ). Such sequences are fused offline to obtain maps that can be used later for localization or for scene rendering. (in a similar fashion to Google Street View) as we show in the accompanying video (video url:(www-sop.inria.fr/members/Renato-Jose.Martins/iros15.html)).
Four papers published by Lagadic in 2015 enclose experimental results obtained with these outdoor vehicles [20] [37] [10] [42] .