Section: New Results
Movement analysis and interpretation
Inertial Sensor based Analysis of Gait for Children with Cerebral Palsy
Participants : Christine Azevedo Coste, Benoît Sijobert, Jessica Rose [Stanford University] .
Analysis of walking abnormalities is important for clinical diagnosis, to guide treatments, and to assess treatment outcomes for gait disorders particularly in children with cerebral palsy (CP). Motion capture, the current gold standard, enables practitioners to perform gait analyses with high accuracy in the laboratory. However, the motion capture technology used is constrained to a small space, the clinical environment may not be relevant to community mobility. This research collaboration investigated the development of a mobile systems using light-weight inertial measurement units (IMU). These sensor-based systems have potential to provide a more efficient, mobile alternative for movement analysis and can offer real-time feedback to patients for more effective rehabilitation. This interdisciplinary collaboration with Professor Jessica Rose, from the Department of Orthopedic Surgery at Stanford University aims to quantitatively assess walking problems associated with CP and related neurological conditions. Despite their small size, ease-of-use, robust design and low-cost, there are numerous recognized technical issues that make the use of IMUs relatively complex moreover in children. Through a series of experiments we leveraged our complementary skills to propose an IMU sensor system and software to extract meaningful gait parameters for rehabilitation of children with CP. A feasibility study was achieved at the Lucile Packard Children’s Hospital Motion & Gait Lab in order to solve technical issues and refine calculations validated based on walking patterns recorded by Laboratory-based 3D motion capture data.
Automatic Human Movement Assessment with Switching Linear Dynamic System: Motion Segmentation and Motor Performance
Participants : Baptista Roberto [Universidade de Brasilia, Brasil] , Bo Antonio P.l. [Universidade de Brasilia, Brasil] , Mitsuhiro Hayashibe.
Performance assessment of human movement is critical in diagnosis and motor-control rehabilitation. Recent developments in portable sensor technology enable clinicians to measure spatiotemporal aspects to aid in the neurological assessment. However, the extraction of quantitative information from such measurements is usually done manually through visual inspection.
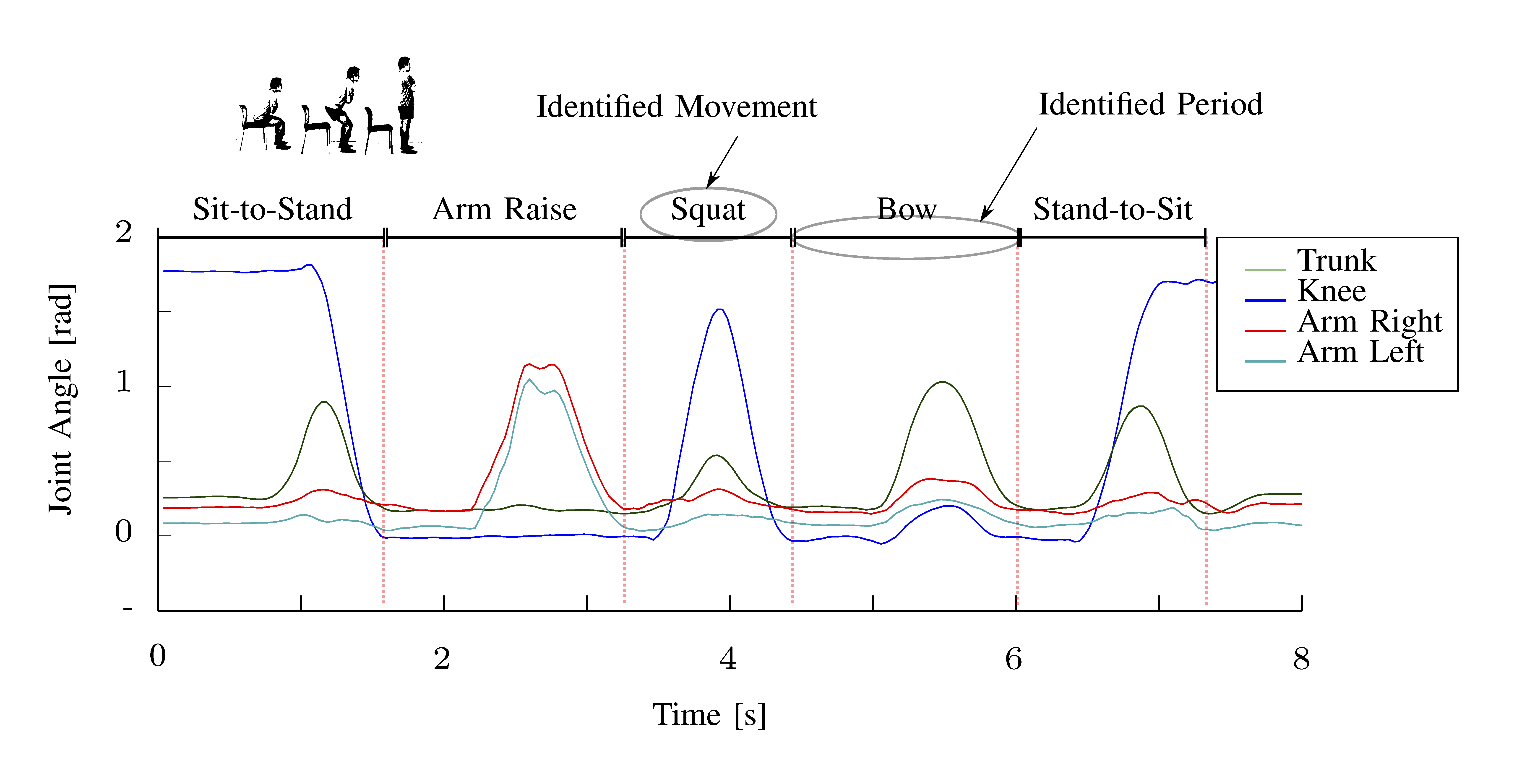
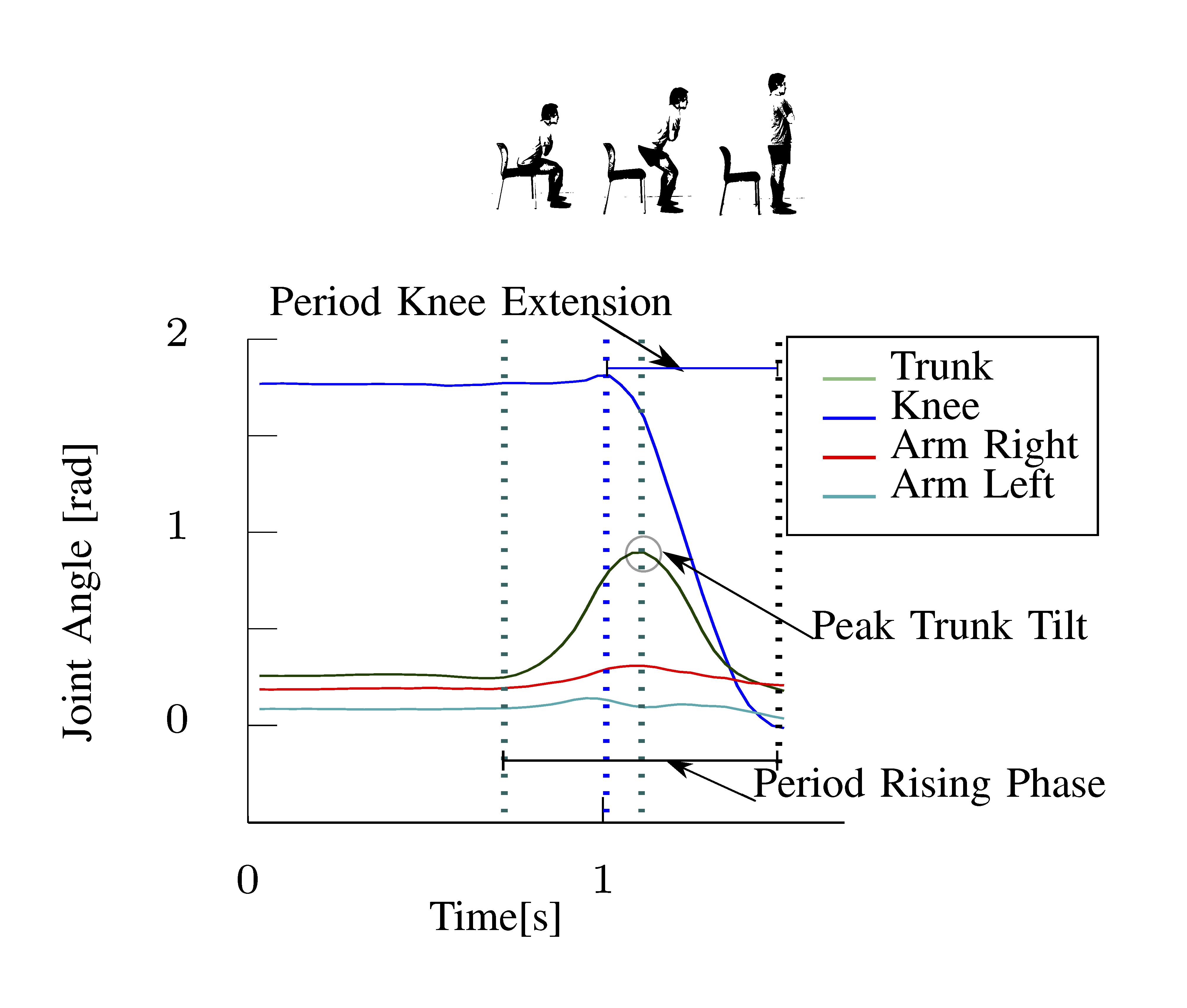
This work presents a novel framework for automatic human movement assessment that executes segmentation and motor performance parameter extraction in time-series of measurements from a sequence of human movements. We use the elements of a Switching Linear Dynamic System model as building blocks to translate formal definitions and procedures from human movement analysis. Our approach provides a method for users with no expertise in signal processing to create models for movements using labeled dataset and latter use it for automatic assessment.
Preliminary tests were carried out involving six healthy adult subjects that executed common movements in functional tests and rehabilitation exercise sessions, such as sit-to-stand and lateral elevation of the arms. Also five elderly subjects, two of which with limited mobility, that executed the sit-to-stand movement. The proposed method worked on random motion sequences for the dual purpose of movement segmentation (accuracy of 72-100%) and motor performance assessment (mean error of 0-12%).
The results of this work have been accepted for publication in the journal IEEE Transactions in Neural Systems and Rehabilitation Engineering.
|
Inertial Sensor based Analysis of Gait for Post-stroke individuals
Participants : Christine Azevedo Coste, Benoît Sijobert, Jérôme Froger [CHU Nîmes] , François Feuvrier [CHU Nîmes] .
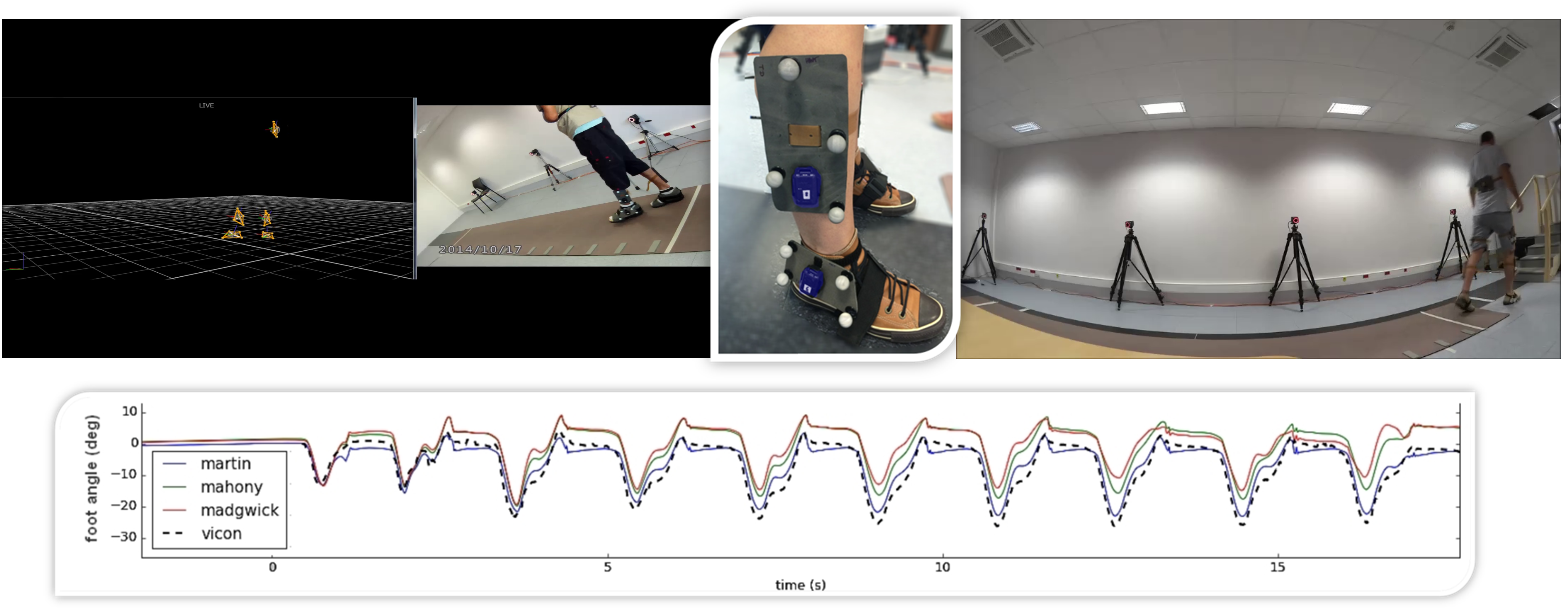
Walking impairment after stroke can be addressed through the use of drop foot stimulators (DFS). In these systems, electrical stimulation is applied to activate the common peroneal nerve and elicit ankle dorsiflexion during the swing phase of gait. DFS are generally piloted by a heel switch positioned in the shoe of the affected side with stimulation being triggered ON by heel rise of the affected foot and triggered OFF by heel strike.
Using inertial sensors for modulating FES intensity could provide a more optimized delivery of stimulation and could also enable to regulate dorsiflexion in the presence of disturbances, such as fatigue or stairs. It could also increase the number of potential users of the technology, allowing subjects walking without heel strikes to be stimulated at a correct timing. Meanwhile, pathological post-stroke gait requires the investigation of complex inertial sensors based algorithms for being able to compute different useful gait parameters for later triggering stimulation.
Numerous constraints related to these clinical context, pathology and usability have to be taken into account for providing a reliable patient oriented solution. In this work, we aim to compare accuracy and feasibility of using a minimum amount of inertial sensors instead of the gold standard camera based motion capture, for assessing joint angles and other gait events such as stride length or dorsiflexion speed at heel on. A maximum of 30 subjects will be included in this experimental protocol. Equipped with motion capture targets on which an inertial sensor is set (Figure 11), subjects have to perform an experimental path on a gait carpet. EMG recordings are also performed to monitor and evaluate fatigue. In further works, algorithms from inertial data developed through these study will enable us to evolve toward close loop control, putting together inertial sensors and programmable stimulator in real time ([39]).