

Section: New Results
Motion Analysis
In motion analysis, we continued designing new approaches to measure human performance in specific applications, such as clinical gait assessment, ergonomics and sports. We also developed an original approach to concurrently analyze and simulate human motion, by addressing the problem of redundancy in musculoskeletal models.
Clinical gait assessment based on Kinect data
Participant : Franck Multon.
In clinical gait analysis, we proposed a method to overcome the main limitations imposed by the low accuracy of the Kinect measurements in real medical exams. Indeed, inaccuracies in the 3D depth images lead to badly reconstructed poses and inaccurate gait event detection. In the latter case, confusion between the foot and the ground leads to inaccuracies in the foot-strike and toe-off event detection, which are essential information to get in a clinical exam. To tackle this problem we assumed that heel strike events could be indirectly estimated by searching for the extreme values of the distance between the knee joints along the walking longitudinal axis. As Kinect sensor may not accurately locate the knee joint, we used anthropometrical data to select a body point located at a constant height where the knee should be in the reference posture. Compared to previous works using a Kinect, heel strike events and gait cycles are more accurately estimated, which could improve global clinical gait analysis frameworks with such a sensor. Once these events are correctly detected, it is possible to define indexes that enable the clinician to have a rapid state of the quality of the gait. We therefore proposed a new method to assess gait asymmetry based on depth images, to decrease the impact of errors in the Kinect joint tracking system. It is based on the longitudinal spatial difference between lower-limb movements during the gait cycle. The movement of artificially impaired gaits was recorded using both a Kinect placed in front of the subject and a motion capture system. The proposed longitudinal index distinguished asymmetrical gait, while other symmetry indices based on spatiotemporal gait parameters failed using such Kinect skeleton measurements. This gait asymmetry index measured with a Kinect is low cost, easy to use and is a promising development for clinical gait analysis.
This method has been challenged with other classical approaches to assess gait asymmetry using either cheap Kinect data or Vicon data. We demonstrate the superiority of the approach when using Kinect data for which traditional approaches failed to accurately detect gait asymmetry. It has been validated on healthy subjects who were forced to walk with a 5cm sole placed below each foot alternatively [2].
This work has been done in collaboration with the MsKLab from Imperial College London, to design new gait asymmetry indexes that could be used in daily clinical analysis.
New automatic methods to assess motion in industrial contexts based on Kinect
Participants : Franck Multon, Pierre Plantard.
Recording human activity is a key point of many applications and fundamental works. Numerous sensors and systems have been proposed to measure positions, angles or accelerations of the user’s body parts. Whatever the system is, one of the main challenge is to be able to automatically recognize and analyze the user’s performance according to poor and noisy signals. Hence, recognizing and measuring human performance are important scientific challenges especially when using low-cost and noisy motion capture systems. MimeTIC has addressed the above problems in two main application domains. In this section, we detail the ergonomics application of such an approach.
Firstly, in ergonomics, we explored the use of low-cost motion capture systems (i.e., a Microsoft Kinect) to measure the 3D pose of a subject in natural environments, such as on a workstation, with many occlusions and inappropriate sensor placements. Predicting the potential accuracy of the measurement for such complex 3D poses and sensor placements is challenging with classical experimental setups. After having evaluated the actual accuracy of the pose reconstruction method delivered by the Kinect, we have identified that occlusions were a very important problem to solve in order to obtain reliable ergonomic assessments in real cluttered environments. To this end, we extended previous correction methods proposed by Hubert Shum (Northumbria University) which consist in identifying the reliable and unreliable parts of the Kinect skeleton data, and to replace unreliable ones by prior knowledge recorded in a database. In collaboration with Hubert Shum, we extended this approach to deal with long occlusions that occur in real manufacturing conditions. To this end we proposed a new data structure named Filtered Pose Graph to speed-up the process, and select example poses that improve the quality of the correction, especially ensuring continuity. We have demonstrated a significant increase of the quality of the correction, especially when large tracking errors occur with the Kinect system [16].
This method has been applied to a complete ergonomic process outputting RULA scores based on the reconstructed and corrected poses. We also demonstrated that it delivers new ergonomic information compared to traditional approaches based on isolated pictures: it provides time spent above a given RULA score which is a valuable information to support decision in ergonomics [15]. We also challenged this method with a reference motion capture system in laboratory conditions. In order to evaluate the actual use in ergonomics, we also compared the ergonomic scores obtained with this automatic method to two experts' scores in real factories. The results show very good agreements between automatic and manual assessments, and have been published in Applied Ergonomics journal [25].
This work was partially funded by the Faurecia company through a Cifre convention.
Evaluation and analysis of sports gestures: application to tennis serve
Participants : Richard Kulpa, Marion Morel, Benoit Bideau, Pierre Touzard.
Following the previous studies we made on tennis serve, we were able to evaluate the link between performance and risk of injuries. To go further, we made new experiments to quantify the influence of fatigue on the performance of tennis serve, that is to say the kinematic, kinetic and performance changes that occur in the serve throughout a prolonged tennis match play [12], [13]. To this end, we recorded serves of several advanced tennis players with a motion capture system before, at mid-match, and after a 3-hour tennis match. Before and after each match, we also recorded electromyographic data of 8 upper limb muscles obtained during isometric maximal voluntary contraction. These experiments showed a decrease in mean power frequency values for several upper limb muscles that is an indicator of local muscular fatigue. Decreases in serve ball speed, ball impact height, maximal angular velocities and an increase in rating of perceived exertion were also observed between beginning and end of match. However, no change in timing of maximal angular velocities was observed. The consistency in timing of maximal angular velocities suggests that advanced tennis players are able to maintain the temporal pattern of their serve technique, in spite of the muscular fatigue development [12]. Moreover, we showed that passive shoulder internal rotation and total range of motion are significantly decreased during a 3-hour tennis match that is identified as an injury risk factor among tennis players [13].
Overall, automatically evaluating and quantifying the performance of a player is a complex task since the important motion features to analyze depend on the type of performed action. But above all, this complexity is due to the variability of morphologies and styles of both novices and experts (who perform the reference motions). Only based on a database of experts’ motions and no additional knowledge, we propose an innovative 2-level DTW (Dynamic Time Warping) approach to temporally and spatially align the motions and extract the imperfections of the novice’s performance for each joint. We applied our method on tennis serves and karate katas [22].
Interactions between walkers
Participants : Anne-Hélène Olivier, Armel Crétual, Julien Bruneau, Richard Kulpa, Sean Lynch, Laurentius Meerhoff, Julien Pettré.
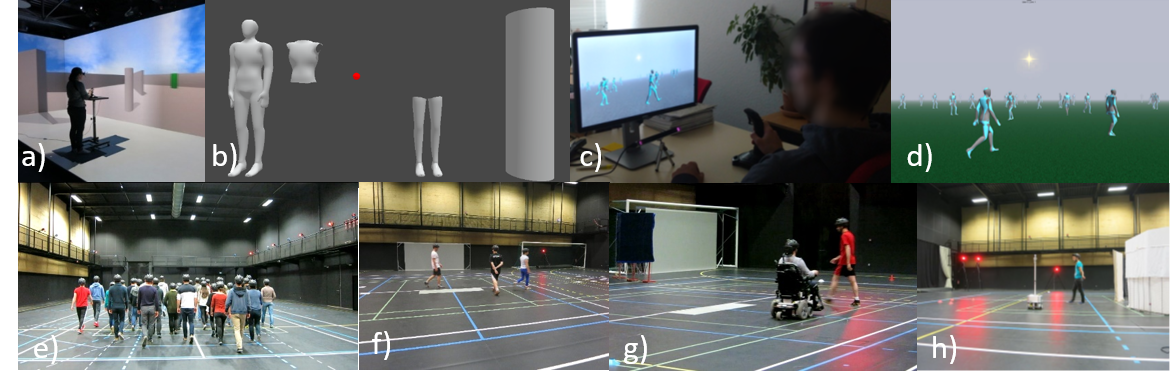
Interaction between people, and especially local interaction between walkers, is a main research topic of MimeTIC. We propose experimental approaches using both real and virtual environments to study both perception and action aspects of the interaction. This year, we developed new experiments in our immersive platform. In the context of Sean Lynch's PhD on the visual perception of human motion during interactions in locomotor tasks, we designed a study to investigate whether local limb motion is required to successfully avoid a single dynamic obstacle or if global motion alone provides sufficient information (Figures 4.a and 4.b). Sixteen healthy subjects were immersed in a virtual environment that required navigating towards a target, whilst an obstacle crossed its path. Within the virtual environment, four occluding walls prevented the subject observing the complete environment at the initiation of movement, ensuring steady state was reached prior to obstacle interaction. The velocity and heading of the obstacle were programmed to result in a range of future crossing distance (varying from 0.1 to 1.2m) in front and behind the subject. The velocity and heading of the obstacle were fixed, and the subject used a joystick to control its orientation to avoid collision. Five obstacle appearances were presented in a randomized order; a full body (control condition), trunk- or legs- only (i.e., local motion only), and a cylinder or sphere representing the center of gravity (COG) (i.e., global motion only). No significant difference for obstacle appearance was found on number of collisions. However, in both global motion only conditions, subjects adopted alternative collision avoidance strategies compared to the full body control condition. Distance regulation and collision avoidance within daily activities may be principally regulated by global rather than local motion. Underlying mechanisms may differ accordingly to shape and size, however there is no impediment for successful completion of collision avoidance.
Second, we provide lot of efforts to investigate the complex case of multiple interactions while in previous studies we mainly focused on pairwise interactions. We developed a new experiment using an eye tracker to provide insight about the selection process of the interactions (Figures 4.c and 4.d). We proposed to study the human gaze during a navigation task in a crowded virtual environment. The characteristics of each virtual agent was known and controlled. Then, by recording the gaze activity, we are able to highlight the characteristics of each agent the participant was looking at. Results first showed a strong link between the fixated agents and the trajectory adaptations of the participants which means that participants looked at agents they are interacting with, which is an important result to validate the use of the eye tracker in such a situation. Concerning the characteristics of the fixated agents, results showed that human gaze, during navigation, is attracted by dangerous individuals: they were the ones presenting the higher risk of future collision with the participants. Future work is needed to evaluate the influence of other factors such as walking speed or the nature of agents trajectories. This year, we also performed an important experimental campaign including 80 participants to investigate collective behavior (Figure 4.e). When people walk together in the street, they have to coordinate their own motion with the ones of their neighbors. From these local interactions, group motion emerges. The objective of this study was to understand how a collective behavior can emerge from these local interactions between individuals. Especially, the study aimed at identifying what is the neighborhood of a walker in a group from a perceptual point of view (who influences your motion). This work was performed in collaboration with William Warren (Brown University, Providence) and Cécile Appert-Rolland (CNRS, Orsay). Data analysis is still in process but from these results we hope to develop new knowledge on pedestrian behavior. These new results will help us to design new or improve existing crowd simulators based on local interactions. These simulators have important economic and societal roles. For example, they allow to validate the design of public places/building, which aims at hosting dense levels of public in perfectly safe conditions. The study of multiple interactions was also strengthened with the arrival of Laurentius Meerhoff as a post-doctoral student with a regional SAD funding in May 2016. Experiments involving 3 walkers were conducted (Figure 4.f). We investigated how collision is avoided in small groups of people and whether people can successfully interact with the whole environment, or whether under some circumstance agents had to resort to sequential treatment. We proposed a method to detect whether the treatment was sequential or simultaneous and we showed the initial relative position between walkers strongly affects how interaction is engaged with.
Third, we started working on the interaction between a walker and a person on a motorized wheelchair (Figure 4.g). This work was performed in collaboration with the Inria Lagadic team. The main objective was to design a control law that allows the wheelchair to automatically navigate in a crowded place without any collision. This is important for people who have difficulties to drive their wheelchair because of cognitive impairments. However, before reaching this objective, some steps are required to understand how walkers and persons on a wheelchair interact together. To this end, we developed a study where we recorded the trajectory of walkers and a person on a wheelchair in a collision avoidance and reaching scenario. Results will help to model such a control law for natural interactions.
Finally, we continue working on the interaction between a walker and a moving robot. This work was performed in collaboration with Philippe Souères and Christian Vassallo (LAAS, Toulouse). The development of Robotics accelerated these recent years, it is clear that robots and humans will share the same environment in a near future. In this context, understanding local interactions between humans and robots during locomotion tasks is important to steer robots among humans in a safe manner. Our work is a first step in this direction. Our goal is to describe how, during locomotion, humans avoid collision with a moving robot. We just published in Gait and Posture our results on collision avoidance between participants and a non-reactive robot (we wanted to avoid the effect of a complex loop by a robot reacting to participants’ motion). Our objective was to determine whether the main characteristics of such interaction preserve the ones previously observed: accurate estimation of collision risk, anticipated and efficient adaptations. We observed that collision avoidance between a human and a robot has similarities with human-human interactions (estimation of collision risk, anticipation) but also leads to major differences [18]. Humans preferentially give way to the robot, even if this choice is not optimal with regard to motion adaptation to avoid the collision. In this new study, we considered the situation where the robot was reactive to the walker's motion (Figure 4.h). First of all, it results that humans have a good understanding of the robot behavior and their reaction are smoother and faster with respect to the case with a non-collaborative robot. Second, humans adapt similarly to human-human study and the crossing order is respected in almost all cases. These results have strong similarities with the ones observed with two humans crossing each other.
Biomechanics for motion analysis-synthesis
Participants : Charles Pontonnier, Georges Dumont, Ana Lucia Cruz Ruiz, Antoine Muller, Diane Haering.
In the context of Ana Lucia Cruz Ruiz's PhD, whose goal is to define and evaluate muscle-based controllers for avatar animation, we developed an original control approach to reduce the redundancy of the musculoskeletal system for motion synthesis, based on the muscle synergy theory. For this purpose we ran an experimental campaign of overhead throwing motions. We recorded the muscle activity of 10 muscles of the arm and the motion of the subjects. Thanks to a synergy extraction algorithm, we extracted a reduced set of activation signals corresponding to the so called muscle synergies and used them as an input in a forward dynamics pipeline. Thanks to a two stage optimization method, we adapted the model's muscle parameters and the synergy signals to be as close as possible of the recorded motion. The results are compelling and ask for further developments [5]. We also proposed a classification about muscle-based controllers for animation that has been published in Computer Graphics Forum [6]. Ana Lucia defended her thesis on December 2nd, 2016.
We are also developing an analysis pipeline thanks to the work of Antoine Muller. This pipeline aims at using a modular and multiscale description of the human body to let users be able to analyse human motion. For now, the pipeline is able to assemble different biomechanical models in a convenient descriptive graph, to calibrate these models thanks to experimental data and to compute inverse dynamics to get joint torques from experimental motion capture data. We also investigated the capacity of motion-based methods to calibrate body segment inertial parameters in characterizing the part of the residuals due to the kinematical error into the dynamical one [23].
We also begin to work on the determination of maximal torque envelopes of the elbow thanks to the work of Diane Haering, Inria Post-doctoral fellow at MimeTIC. These results have a great potential of application i) to quantify the articular load during work tasks and ii) to help calibrating muscle parameters for musculoskeletal simulations. Preliminary results have been presented to an international biomechanics conference [21].
Finally, in collaboration with the CERAH (Centre d'étude et d'appareillage des handicapés, institut des invalides, Créteil, France), we proposed an identification-based method for knee prosthesis characteristics. The method is based on a forward dynamics framework enabling a matching between experimental data and model behavior [26].