Section: New Results
Reconstruction of Geometries from Images
Automatic Skeletonization of Vascular Trees in Pre-operative CT Images
Participants: R. Plantefève, I. Peterlik
An algorithm of an automatic skeletonization of vascularization based on Dijkstra minimum-cost spanning tree was published in [27]. The result is an extension of an existing graph-based method where the vascular topology is constructed by computation of shortest paths in a minimum-cost spanning tree obtained from binary mask of the vascularization. We suppose that the binary mask is extracted from a 3D CT image using automatic segmentation and thus suffers from important artifacts and noise. When compared to the original algorithm, the proposed method (i) employs a new weighting measure which results in smoothing of extracted topology and (ii) introduces a set of tests based on various geometric criteria which are executed in order to detect and remove spurious branches. The method is evaluated on vascular trees extracted from abdominal contrast-enhanced CT scans and MR images. The method is quantitatively compared to the original version of the algorithm showing the importance of proposed modifications. Since the branch testing depends on parameters, the para-metric study of the proposed method is presented in order to identify the optimal parametrization.
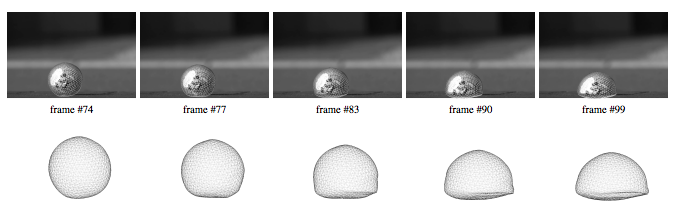
Template-based Recovery of Elastic Shapes from Monocular Video
Participants: N. Haouchine, S. Cotin
A method of template-based 3D recovery of elastic shapes using Lagrange multiplied was presented at a top computed-vision conference [21]. By exploiting the object's elasticity, in contrast to isometric methods that use inextensibility constraints, a large range of deformations can be handled. Our method is expressed as a saddle point problem using Lagrangian multipliers resulting in a linear system which unifies both mechanical and optical constraints and integrates Dirichlet boundary conditions, whether they are fixed or free. We experimentally show that no prior knowledge on material properties is needed, which exhibit the generic usability of our method with elastic and inelastic objects with different kinds of materials. Comparison with existing techniques are conducted on synthetic and real elastic objects with strains ranging from 25% to 130% resulting to low errors.
|