Section: New Results
FES-based online closed-loop control of knee joint to reduce stance phase asymmetry in post-stroke gait
Participants : Benoît Sijobert, Christine Azevedo, Charles Fattal.
Numerous stimulation strategies have been investigated over the past thirty years to assist or restore gait (Figure 6). The studies using FES to restore gait have been mostly conducted in post-stroke individuals and focused on correcting the drop foot syndrome by supplementing the absence of dorsiflexion. The state-of-the-art reflects a real lack of interest in using FES to improve the paretic knee rehabilitation, which however plays a key role in post-stroke gait recovery.
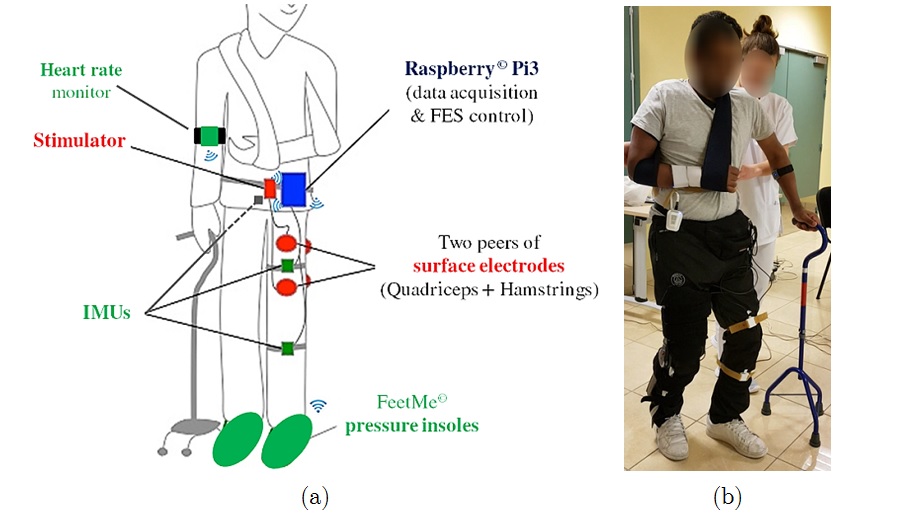
An experimental protocol (#RCB 2017-A03611-52, CRF La Chataigneraie, Menucourt, France) was designed with the main purpose of proposing a novel approach using a FES-based control of knee joint to reduce stance phase asymmetry and study the feasibility of using such FES systems in clinical rehabilitation, compared to classical knee orthosis. Secondary objectives aimed at improving gait quality, walking range and comfortable speed using the same modality. The main hypothesis was to determine if using FES to real-time control the paretic knee angle could reduce the time needed to recover a normal balance while providing a secure stance phase. To monitor weight bearing and stance time asymmetry the participants were equipped with instrumented insoles. The subjects were also equipped with 2 inertial measurement units located on the thigh and the tibia, wired to a Raspberry Pi3. Each IMU embedded a high speed based processor and a Kalman Filter directly providing quaternion estimation needed to compute knee angles. One IMU was installed in the back of the participants at the second sacral vertebra level to estimate vertical trunk displacement. Stimulation was sent via a two-channel wireless stimulator to the quadriceps and hamstrings via surface electrodes. A specific hardware architecture has been developed for this protocol. When required and depending on the participant’s gait pattern, a “pre-stance” stimulation could be triggered either via an online detection of peak knee flexion or when the sagittal angular speed recorded via the gyroscope crossed zero. In stance phase, stimulation was triggered either to quadriceps or hamstrings, depending on the paretic knee angle (PKA) estimation relatively to the knee angle setpoint (KAS) defined by the practitioner as the optimal flexion during stance phase (around 5o). A proportional (P) controller adjusted the pulse width depending on the error between PKA and KAS. Equipped with their usual technical aids (cane, ankle foot orthosis...) participants were asked to perform a 10m-path walking at a self-selected pace. An oral instruction was given at the beginning of each trial to encourage the participants to transfer their weight onto the paretic leg. This experiment is an ongoing experiment but preliminary tests have already validated the technical feasibility of the approach.
|