Section: New Results
A sensor fusion approach for inertial sensors based 3D kinematics and pathological gait assessments
Participants : Benoît Sijobert, Christine Azevedo, Jérôme Froger, Francois Feuvrier.
Pathological gait assessment and assistive control based on functional electrical stimulation (FES) in post-stroke individuals, brings out a common need to robustly quantify kinematics facing multiple constraints.
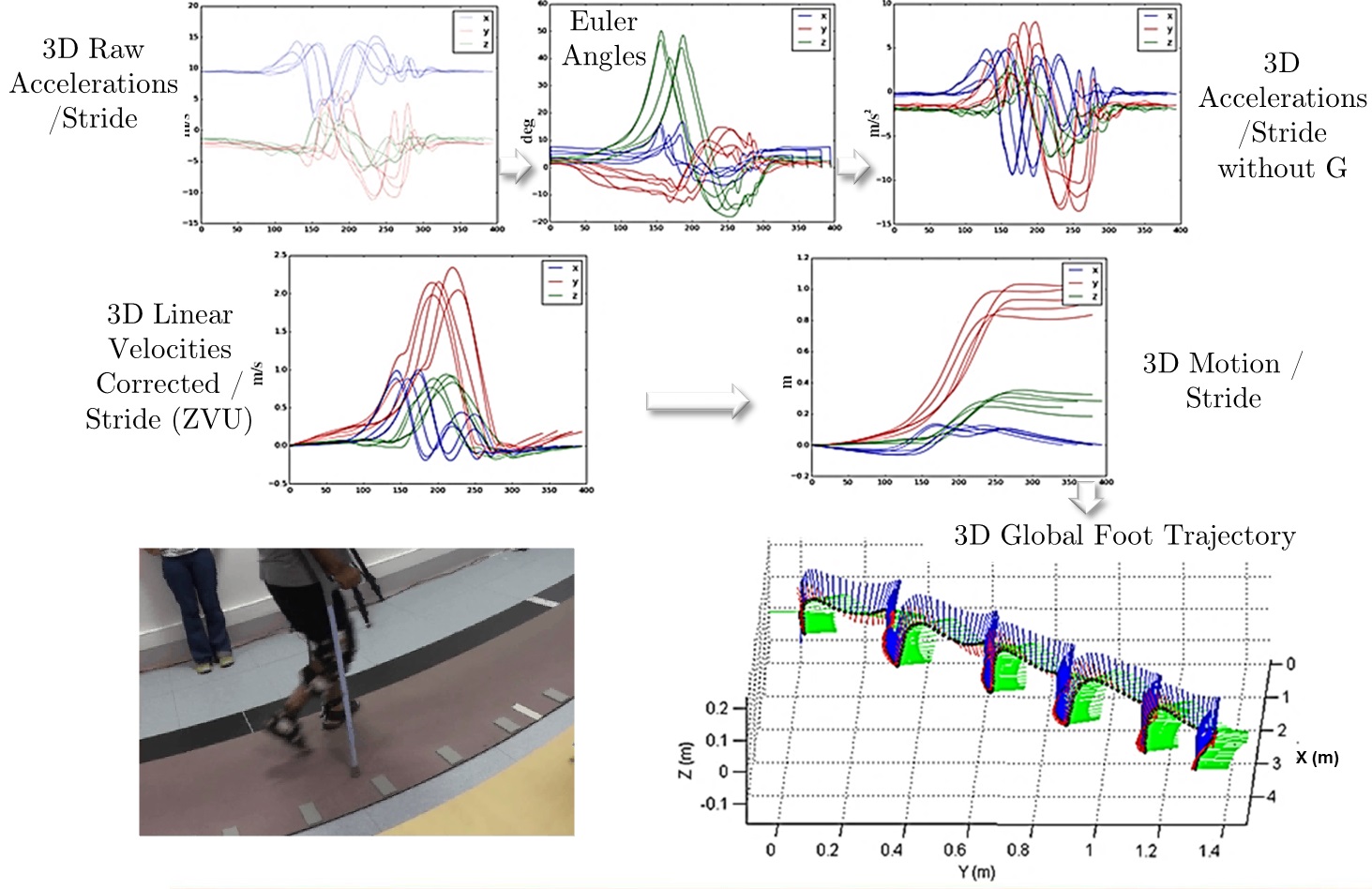
Through an experimental study(Figure 5), we proposed a novel approach using inertial sensors to compute dorsiflexion angles and spatio-temporal parameters, in order to be later used as inputs for online close-loop control of FES. 26 post-stroke subjects were asked to walk on a pressure mat (GaitRite®) equipped with inertial measurement units (IMU) and passive reflective markers (Vicon®). A total of 930 strides were individually analyzed and results between IMU-based algorithms and reference systems compared. The novel methods integrated two aspects: 1) robust stance phase detection based on acceleration and angular rate combination and 2) estimation of joint angles based on an Attitude and Heading Reference System (non linear observer) algorithm and gravity cancellation for reconstructing 3D trajectory of individual steps. Mean absolute (MA) errors of dorsiflexion angles were found to be less than 4°, while stride lengths were robustly segmented and estimated with a MA error less than 10 cm [30]. These results open new doors to rehabilitation using adaptive FES closed-loop control strategies.