

Section: New Results
Bayesian Perception
Participants : Christian Laugier, Lukas Rummelhard, Jean-Alix David, Thomas Genevois, Jerome Lussereau, Nicolas Turro [SED] , Jean-François Cuniberto [SED] .
Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT) Framework
Participants : Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Thomas Genevois, Christian Laugier, Nicolas Turro [SED] .
Recognized as one of the core technologies developed within the team over the years (see related sections in previous activity report of Chroma, and previously e-Motion reports), the CMCDOT framework is a generic Bayesian Perception framework, designed to estimate a dense representation of dynamic environments [83] and the associated risks of collision [85], by fusing and filtering multi-sensor data. This whole perception system has been developed, implemented and tested on embedded devices, incorporating over time new key modules [84]. In 2018, this framework, and the corresponding software, has continued to be the core of many important industrial partnerships and academic contributions [17] [18] [16] [15] [45] [47], and to be the subject of important developments, both in terms of research and engineering. Some of those recent evolutions are detailed below.
-
CMCDOT evolutions : important developments in the CMCDOT, in terms of calculation methods and fundamental equations, were introduced and tested this year. These developments could lead, in the coming months, to the proposal of a new patent, then to academic publications. These changes introduced, among other evolutions, a much higher update frequency, greater flexibility in the management of transitions between states (and therefore a better system reactivity), as well as the management of a high variability in sensor frequencies (for each sensor over time, and in the set of sensors). The technical documents describing those developments are currently being redacted, and will be described in the next annual report.
-
Multi-sensor integration in the Ground Estimator : the module of dynamic estimation of the shape of the ground and data segmentation, based solely on the sensor point clouds (no prior map information), the first step of data interpretation in CMCDOT framework, has been developed since 2016, patented and published in 2017. The corresponding software, until this year, could not take into account more than one sensor. In case of multiple sensors, several different modules were to be launched, their respective occupancy grids then fused, not only increasing the global computation use, but also preventing each sensor from benefiting from the ground models generated by the others. This point was corrected this year, by introducing the management of multiple input sensors, unifying the ground estimation in a single model, thus leading to improved performance, both in terms of calculation and results.
-
Velocity display : in the CMCDOT framework, velocity of every element of the scene is inferred at a cell level, without object segmentation. This low-level velocity estimation is one of the most original and important aspects of the method, and should be displayed accordingly. A velocity display module, displaying for each occupied cell of the grid the average of the estimated velocity, generating colors depending on the intensity and the orientation, has been developed, see Fig. 5.
Figure 5. Image from the Velocity Display module : in every occupied cell of the grid, the average velocity is represented by a color code, the hue being based on the orientation, the saturation on its norm. A static cell is white, a cell moving in the same direction as the vehicle is red, in the opposite direction in blue. In the grid can be seen the moving balloons, the pedestrians being static. 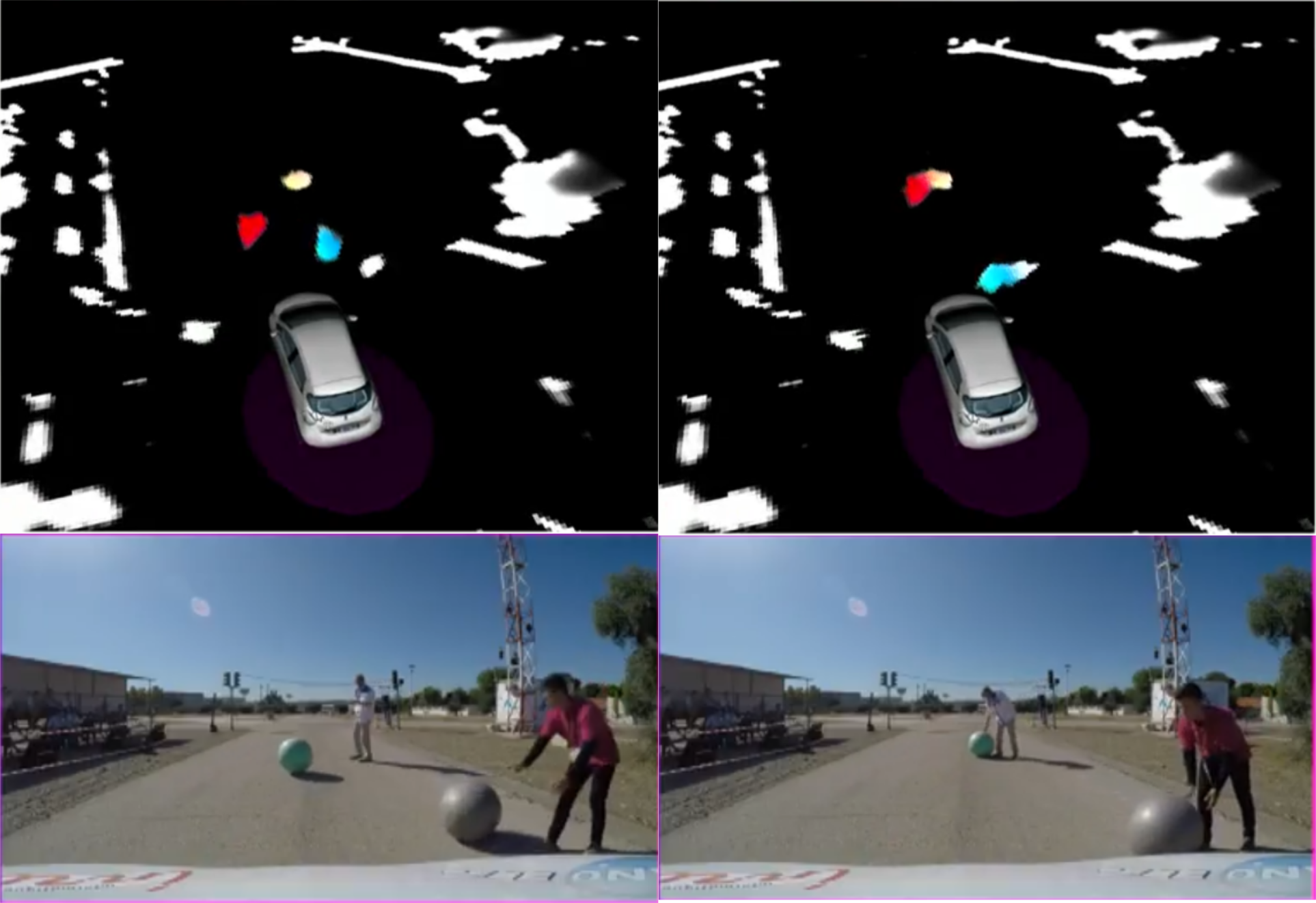
-
Software optimization : the whole CMCDOT framework has been developed on GPUs (implementations in C++/Cuda), an important focus of the engineering has always been, and continued to be in 2018, on the optimization of the software and methods to be embedded on low energy consumption embedded boards (now Nvidia Jetson TX2).
-
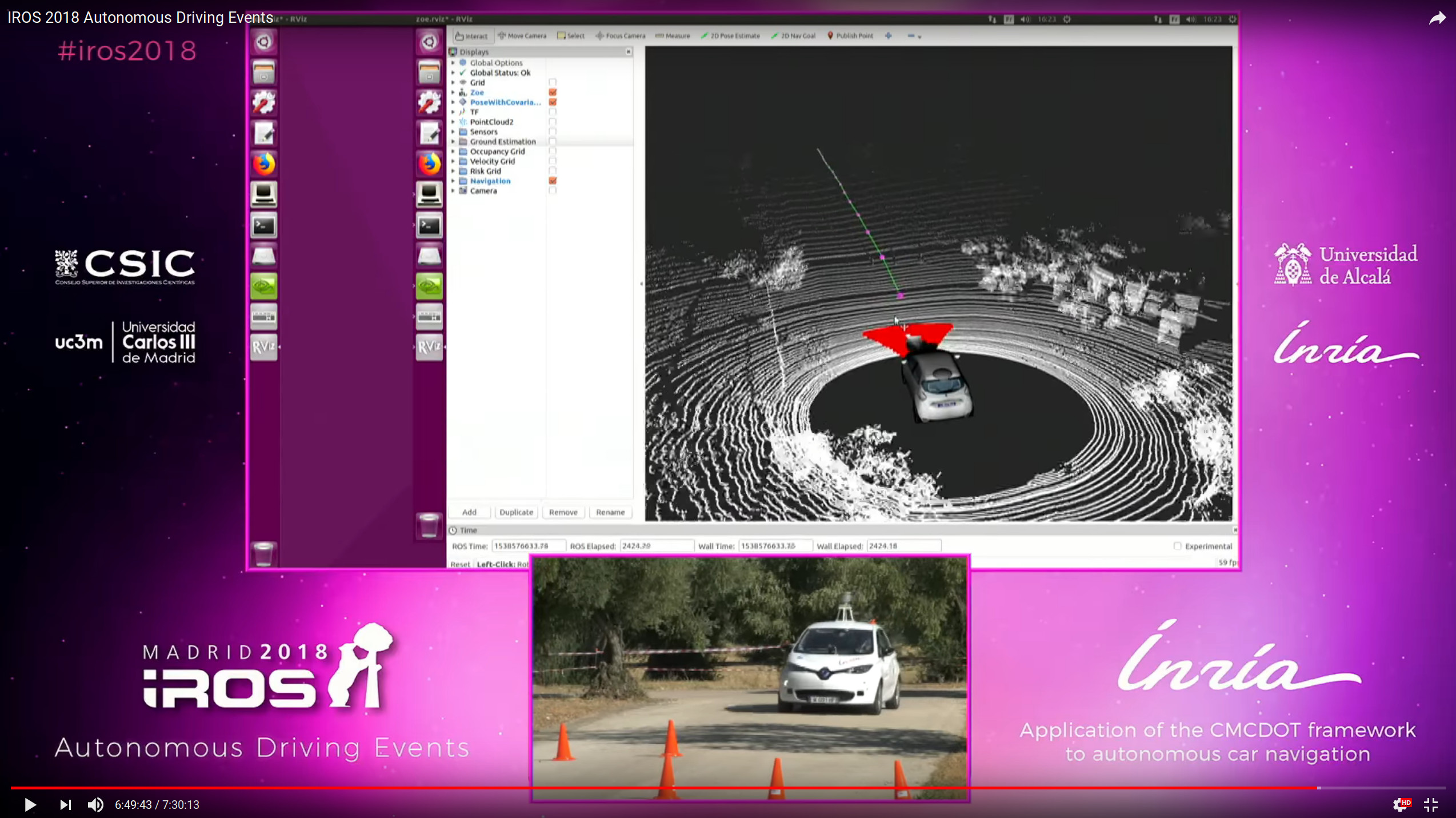
IROS 2018 Autonomous Driving event : https://hal.inria.fr/medihal-01963296v1 As already mentioned in the highlights of the year, the experimental Zoe platform, funded by IRT Nanoelec, has participated at IROS2018 in the Autonomous Vehicle Demonstrations, a full day of demonstration of autonomous vehicle capacities from various research centers. During this successful event, it has been presented and demonstrated on live conditions the effectiveness of the embedded CMCDOT framework, in connection with the newly developed control and decision making systems.
Simulation based validation
Participants : Thomas Genevois, Lukas Rummelhard, Nicolas Turro [SED] , Christian Laugier, Anshul Paigwar, Alessandro Renzaglia.
Since 2017, we are working to address the concept of simulation based validation in the scope of the EU Enable-S3 project, with the objective of searching for novel approaches, methods, tools and experimental methodology for validating BOF-based algorithms. For that purpose, we have collaborated with the Inria Tamis team (Rennes) and with Renault for developing the simulation platform that is used in the test platform. The simulation of both the sensors and the driving environment are based on the Gazebo simulator. A simulation of the prototype car and its sensors has also been realized, meaning that the same implementation of CMCDOT can handle both real data and simulated data. The test management component that generates random simulated scenarios has also been developed. Output of CMCDOT computed from the simulated scenarios are recorded by ROS and analyzed through the Statistical Model Checker (SMC) developed by the Inria Tamis team. In [41], we presented the first results of this work, where a decision-making approach for intersection crossing (see Section 7.2.3) has been analyzed. In particular new KPIs expressed as Bounded Linear Temporal Logic (BLTL) formula have been defined. Temporal formulas allow a finer formulation of KPIs by taking into account the evolution of the metrics during time. A further work in this direction will be done in the next months to provide new results on the validation of the perception algorithm, namely for the velocity estimation and collision risk assessment. For this part, we are also exploring the advantages and potentiality of a new open-source vehicle simulator (Carla), which would allow considering more realistic scenarios with respect to Gazebo. This work on simulation-based validation will be continued in 2019.
Previously, in 2017, CHROMA has developed a model of the Renault Zoe demonstrator within the simulation framework Gazebo. In 2018, we have improved it to keep it up-to-date after several evolutions of the actual demonstrator. Namely, the drivers of the simulated lidars and the control law have been updated. Thus the model now provides the outputs corresponding to a simulated Inertial Measurement Unit.
Control and navigation
Participants : Thomas Genevois, Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Christian Laugier, Nicolas Turro [SED] , Rabbia Asghar.
|
In 2018, we have updated the Renault Zoe demonstrator in collaboration with the LS2N (Laboratoire des Sciences Numérique de Nantes). The control codes have been transferred to the micro-controllers of the car for a faster and more precise control. An electric signal has been added to identify when the driver acts on the manual controls of the car. Finally the control law of the vehicle has been modified in order to consider a command in acceleration. These modifications allowed us to improve the software we use to control the vehicle. We have improved our implementation of DWA (Dynamic Window Approach) local planner in order to handle acceleration commands. This local planner has also been modified to take in account maxima of lateral acceleration and to integrate a path following module in its cost function. Thanks to this, the new version of this program provides a smooth command for a combination of path following and obstacle avoidance with the demonstrator Renault Zoe. This has been showed at the Autonomous Vehicle Demonstration event at IROS2018, Madrid, Figure 6 [46].
We have also experimented a driving assistant for autonomous obstacle avoidance. We showed that it is possible on the Renault Zoe demonstrator to let a driver drive manually the car and then, when a collision risk is identified, to take over the control with the autonomous drive and perform an avoidance maneuver. A simple ADAS (Advanced Driving Assistance System) system has been developed for this purpose. In addition, we have developed on the Renault Zoe demonstrator, a localization system which merges the data of wheel speed, accelerometer, gyrometer, magnetometer and GPS into a position estimation. This relies on an Extended Kalman Filter. This will probably be extended later to consider the localization with respect to roads identified on a map.
Finally a Dijkstra Algorithm have been tested in simulation to define a global navigation path allowing management of waypoints to give to the DWA planner for local navigation.