

Section: New Results
Situation Awareness & Decision-making
Participants : Christian Laugier, Olivier Simonin, Jilles Dibangoye, David Sierra-Gonzalez, Mathieu Barbier, Victor Romero-Cano [Universidad Autónoma de Occidente, Cali, Colombia] , Ozgur Erkent, Christian Wolf.
Dense & Robust outdoor perception for autonomous vehicles
Participants : Christian Laugier, Victor Romero-Cano, Özgür Erkent, Christian Wolf.
Robust perception plays a crucial role in the development of autonomous vehicles. While perception in normal and constant environmental conditions has reached a plateau, robustly perceiving changing and challenging environments has become an active research topic, particularly due to the safety concerns raised by the introduction of autonomous vehicles to public streets. Solving the robustness issue in road and urban perception applications is the first challenge. Then, it is also mandatory to develop an appropriate framework for extracting relevant semantic information. Our approach is to reason about vision-based data and the output of our grid-based multi-sensors perception approach (see previous section).
The work presented in this section has partly been done in 2017 and completed in 2018, in the scope of our collaboration with Toyota Motor Europe (TME). The main objective was to develop a framework for integrate the outcomes of the deep learning methods with a well-established area, occupancy grids obtained with a Bayesian filtering method in the grid space.
In this work, we are interested in 2D egocentric representations. We propose a method, which estimates an occupancy grid containing detailed semantic information. The semantic characteristics include classes like road, car, pedestrian, sidewalk, building, vegetation, etc.. To this end, we leverage and fuse information from multiple sensors including Lidar, odometry and monocular RGB video. To benefit from the respective advantages of the two different methodologies, we propose a hybrid approach leveraging i) the high-capacity of deep neural networks as well as ii) Bayesian filtering, which is able to model uncertainty in a unique way.
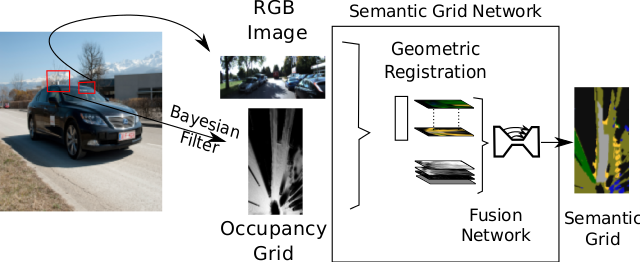
In the system depicted by Figure 7, Bayesian particle filtering processes the Lidar data as well as odometry information from the vehicle's motion in order to robustly estimate an egocentric bird's eye view in the form of an occupancy grid. This grid contains a 360 view of the environment around the car and integrates information from the observation history through temporal filtering; however, it does not include fine-grained semantic classes.
Deep Learning is used for two different tasks in our work. Firstly, a deep network performs semantic segmentation of monocular RGB images. This network has been pre-trained on large scale datasets for image classification and fine-tuned on the vehicle datasets. Secondly, a deep network fuses the occupancy grid with the segmented image of the projective view in order to estimate the semantic grid. Since the occupancy grid is dense, the semantic grid is also expected to be dense. We pay particular attention to correctly model the transformation from the egocentric projective view of the RGB image to the bird's eye view of the occupancy grid as input to the neural network. This work was filed for a patent [98] and published in [28], [14].
Novel approach: Semantic Grid Estimation with a Hybrid Bayesian and Deep Neural Network Approach.
Current and future work in the scope of our collaboration with TME, aims at constructing Semantic Occupancy Grids. We propose a hybrid approach, which combines the advantages of Bayesian filtering and deep neural networks. Bayesian filtering provides robust temporal/geometrical filtering and integration and allows for modelling of uncertainty. RGB information and deep neural networks provide knowledge about the semantic class labels like sideway vs road. The fusion process is fully learned and due to dense structure of occupancy grid, we can construct a dense semantic grid even if we have a sparse point cloud.
Towards Human-Like Motion Prediction and Decision-Making in Highway Scenarios
Participants : David Sierra González, Victor Romero-Cano, Özgür Erkent, Jilles Dibangoye, Christian Laugier.
The objective is to develop human-like motion prediction and decision-making algorithms to enable automated driving in highways. This research work is done in the scope of the Inria-Toyota long-term cooperation on Autonomous Driving and of the PhD thesis work of David Sierra González.
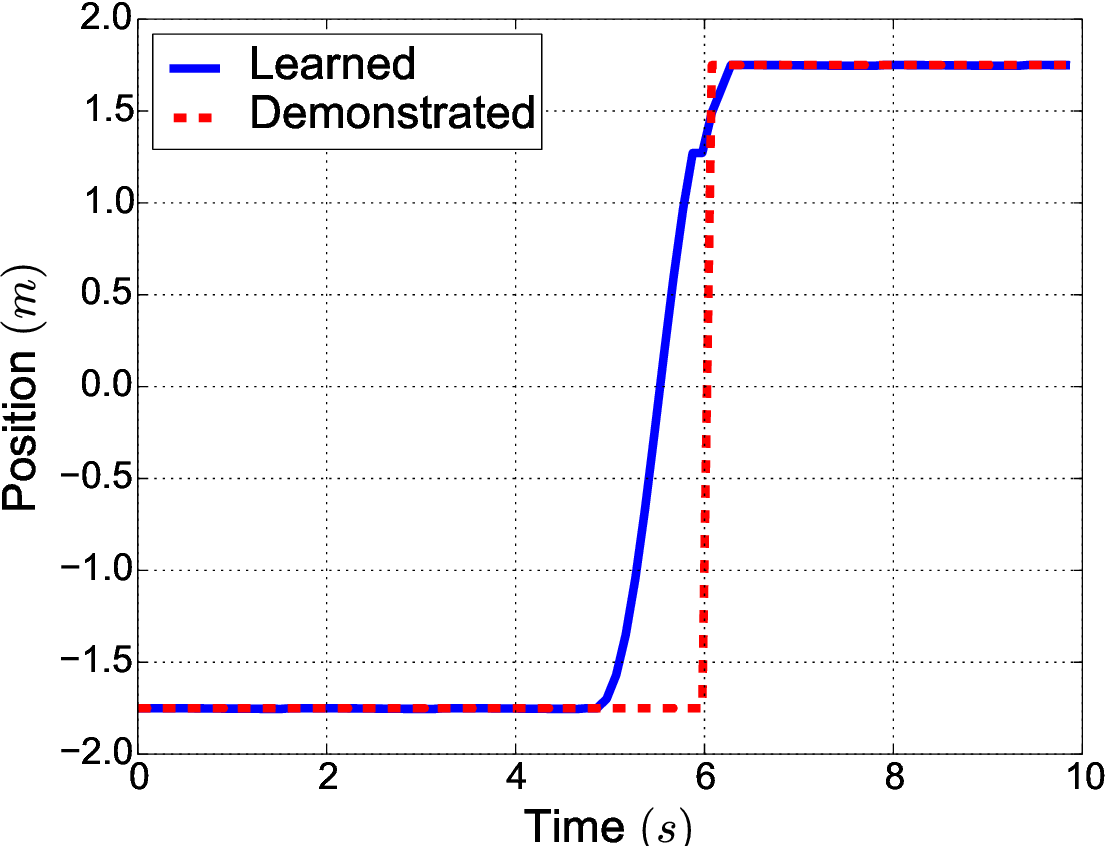
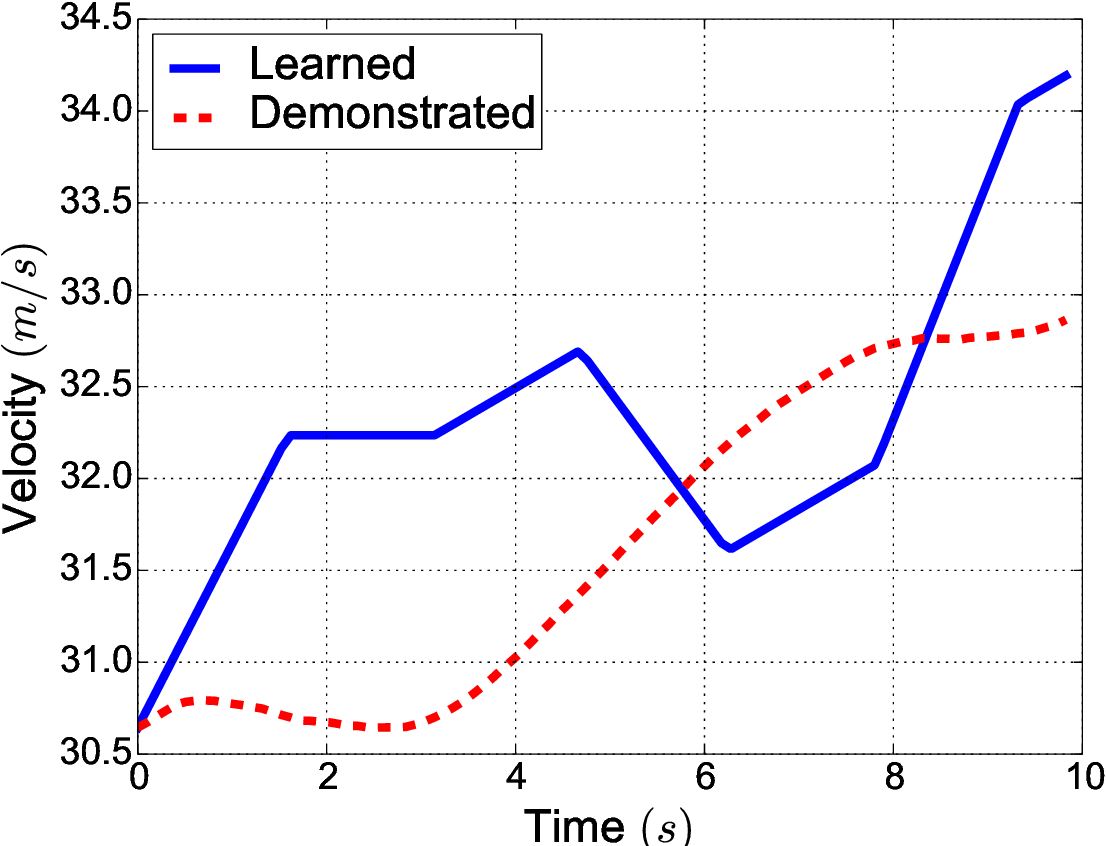
Previous work from our team has shown the predictive potential of driver behavioral models learned from demonstrations using Inverse Reinforcement Learning (IRL) [87] [88]. Unfortunately, these models are hard to learn from real-world driving data due to the inability of traditional IRL algorithms to handle continuous state spaces and dynamic environments. To facilitate this task, we have proposed in 2018 an approximated IRL algorithm for driver behavior modeling that successfully scales to continuous spaces with moving obstacles, by leveraging a spatio-temporal trajectory planner [35]. The proposed algorithm was validated using real-world data gathered with an instrumented vehicle. As an example, Figure 8 shows the similarity between the trajectory obtained using a driver model learned with the proposed method and that of a real human driver in a highway overtake scenario. Current efforts are directed towards integrating the learned behavioral models and the predictive models developed in the scope of this project into a decision-making framework for highways. David Sierra González will defend his PhD thesis in March 2019.
|


Decision-making for safe road intersection crossing
Participants : Mathieu Barbier, Christian Laugier, Olivier Simonin.
Road intersections are probably the most complex segment in a road network. Most major accidents occur at intersections, mainly caused by human errors due to failures in fully understanding the encountered situations. Indeed, as drivers approach a road intersection, they must assess the situation and quickly adapt their behaviour accordingly. When this task is performed by a computer, the available information is partial and uncertain. Any decision requires the system to use this information as well as taking into account the behaviour of other drivers to avoid collisions. However, metrics such as collision rate can remain low in an interactive environment because of other driver's actions. Consequently, evaluation metrics must depend on other driving aspects.
In this framework, we developed a decision-making mechanism and designed metrics to evaluate such a system at road intersection crossing [22]. For the former, a Partially Observable Markov Decision Process (POMDP) is used to model the system with respect to uncertainties in the behaviour of other drivers. For the latter, different key performance indicators are defined to evaluate the resulting behaviour of the system in different configurations and scenarios. The approach has been demonstrated within an automotive grade simulator.
Current work aims at increasing the complexity of the scenario, to include pedestrians and more vehicles, and improving the model used for the dynamics of the vehicle and the observation of the physical state to get closer to real world scenarios.
This work has been carried out in the framework of the PhD thesis of Mathieu Barbier, which will be defended in the first trimester of 2019.