Section: New Results
Computational Models Of Human Learning and Development
Computational Models Of Information-Seeking and Curiosity-Driven Learning in Humans and Animals
Participants : Pierre-Yves Oudeyer [correspondant] , William Schueller, Sébastien Forestier, Alexandr Ten.
This project involves a collaboration between the Flowers team and the Cognitive Neuroscience Lab of J. Gottlieb at Columbia Univ. (NY, US), on the understanding and computational modeling of mechanisms of curiosity, attention and active intrinsically motivated exploration in humans.
It is organized around the study of the hypothesis that subjective meta-cognitive evaluation of information gain (or control gain or learning progress) could generate intrinsic reward in the brain (living or artificial), driving attention and exploration independently from material rewards, and allowing for autonomous lifelong acquisition of open repertoires of skills. The project combines expertise about attention and exploration in the brain and a strong methodological framework for conducting experimentations with monkeys, human adults and children together with computational modeling of curiosity/intrinsic motivation and learning.
Such a collaboration paves the way towards a central objective, which is now a central strategic objective of the Flowers team: designing and conducting experiments in animals and humans informed by computational/mathematical theories of information seeking, and allowing to test the predictions of these computational theories.
Context
Curiosity can be understood as a family of mechanisms that evolved to allow agents to maximize their knowledge (or their control) of the useful properties of the world - i.e., the regularities that exist in the world - using active, targeted investigations. In other words, we view curiosity as a decision process that maximizes learning/competence progress (rather than minimizing uncertainty) and assigns value ("interest") to competing tasks based on their epistemic qualities - i.e., their estimated potential allow discovery and learning about the structure of the world.
Because a curiosity-based system acts in conditions of extreme uncertainty (when the distributions of events may be entirely unknown) there is in general no optimal solution to the question of which exploratory action to take [100], [125], [135]. Therefore we hypothesize that, rather than using a single optimization process as it has been the case in most previous theoretical work [82], curiosity is comprised of a family of mechanisms that include simple heuristics related to novelty/surprise and measures of learning progress over longer time scales [123] [54], [111]. These different components are related to the subject's epistemic state (knowledge and beliefs) and may be integrated with fluctuating weights that vary according to the task context. Our aim is to quantitatively characterize this dynamic, multi-dimensional system in a computational framework based on models of intrinsically motivated exploration and learning.
Because of its reliance on epistemic currencies, curiosity is also very likely to be sensitive to individual differences in personality and cognitive functions. Humans show well-documented individual differences in curiosity and exploratory drives [98], [134], and rats show individual variation in learning styles and novelty seeking behaviors [74], but the basis of these differences is not understood. We postulate that an important component of this variation is related to differences in working memory capacity and executive control which, by affecting the encoding and retention of information, will impact the individual's assessment of learning, novelty and surprise and ultimately, the value they place on these factors [130], [146], [48], [150]. To start understanding these relationships, about which nothing is known, we will search for correlations between curiosity and measures of working memory and executive control in the population of children we test in our tasks, analyzed from the point of view of a computational models of the underlying mechanisms.
A final premise guiding our research is that essential elements of curiosity are shared by humans and non-human primates. Human beings have a superior capacity for abstract reasoning and building causal models, which is a prerequisite for sophisticated forms of curiosity such as scientific research. However, if the task is adequately simplified, essential elements of curiosity are also found in monkeys [98], [93] and, with adequate characterization, this species can become a useful model system for understanding the neurophysiological mechanisms.
Objectives
Our studies have several highly innovative aspects, both with respect to curiosity and to the traditional research field of each member team.
-
Linking curiosity with quantitative theories of learning and decision making: While existing investigations examined curiosity in qualitative, descriptive terms, here we propose a novel approach that integrates quantitative behavioral and neuronal measures with computationally defined theories of learning and decision making.
-
Linking curiosity in children and monkeys: While existing investigations examined curiosity in humans, here we propose a novel line of research that coordinates its study in humans and non-human primates. This will address key open questions about differences in curiosity between species, and allow access to its cellular mechanisms.
-
Neurophysiology of intrinsic motivation: Whereas virtually all the animal studies of learning and decision making focus on operant tasks (where behavior is shaped by experimenter-determined primary rewards) our studies are among the very first to examine behaviors that are intrinsically motivated by the animals' own learning, beliefs or expectations.
-
Neurophysiology of learning and attention: While multiple experiments have explored the single-neuron basis of visual attention in monkeys, all of these studies focused on vision and eye movement control. Our studies are the first to examine the links between attention and learning, which are recognized in psychophysical studies but have been neglected in physiological investigations.
-
Computer science: biological basis for artificial exploration: While computer science has proposed and tested many algorithms that can guide intrinsically motivated exploration, our studies are the first to test the biological plausibility of these algorithms.
-
Developmental psychology: linking curiosity with development: While it has long been appreciated that children learn selectively from some sources but not others, there has been no systematic investigation of the factors that engender curiosity, or how they depend on cognitive traits.
Current results: experiments in Active Categorization
In 2018, we have been occupied by analyzing data of the human adult experiment conducted in 2017. In this experiment we asked whether humans possess, and use, metacognitive abilities to guide performance-based or LP-based exploration in two contexts in which they could freely choose to learn about 4 competing tasks. Participants (n = 505, recruited via Amazon Mechanical Turk) were tested on a paradigm in which they could freely choose to engage with one of four different classification tasks. The experiment yielded a rich but complex set of data. The data includes records of participants' classification responses, task choices, reaction times, and post-task self-reports about various subjective evaluations of the competing tasks (e.g. subjective interest, progress, learning potential, etc.). We are currently analyzing the results and working on a computational models of the underlying cognitive and motivational mechanisms.
The central question going into the study was, how active learners become interested in specific learning exercises: how do they decide which task to be interested in – i.e., allocate “study time" - given that the underlying rewards or patterns are sparse and unknown? Using a family of statistical (multinomial logit), subjective-utility-based models of discrete choice behavior [109] we performed an exploratory all-subsets model selection exercise [61] to see if we can identify important and/or interesting variables that could reliably predict task choices. The initial set of variables included, among other things, various performance-based competence heuristics (e.g. current hit rate, likelihood of current hit rate). Model selection and multimodel inference pointed to a handful of variables that had relatively high influence on task choices (including the likelihood of current hit rate and relative amount of time spent on a task), but their absolute effects were small, leaving most of the variation in task choices unexplained. This exercise also pointed out the potential limitations of our approach, either in operationalization of competence as a purely performance-based statistic, or in the potential lack of behavioral constraints in design of the experiment (participants may have been basing their choices on unanticipated variables). This latter limitation is tricky, since we are interested in exploratory behavior in unconstrained settings. What could have alleviated this challenge is a more diverse set of measurements that could include, for example, online records of participants' subjective feelings of interest, competence, liking, or learning potential. At this point, results concerning the LP hypothesis still have not revealed themselves, but we have gained valuable clues on how to find them. The next important step is to use cognitive models with transparent knowledge representations (e.g. Bayesian classifiers or neural networks) as an alternative way to operationalize subjective feelings of competence. The cognitive modeling approach emphasizes the idealistic assumptions made about the mind and examines their implicated behavioral outcomes. By doing that, cognitive models of learning and subjective competence can show whether our assumptions about the cognitive processes involved lead to the same behavioral patterns as the ones humans actually produce.
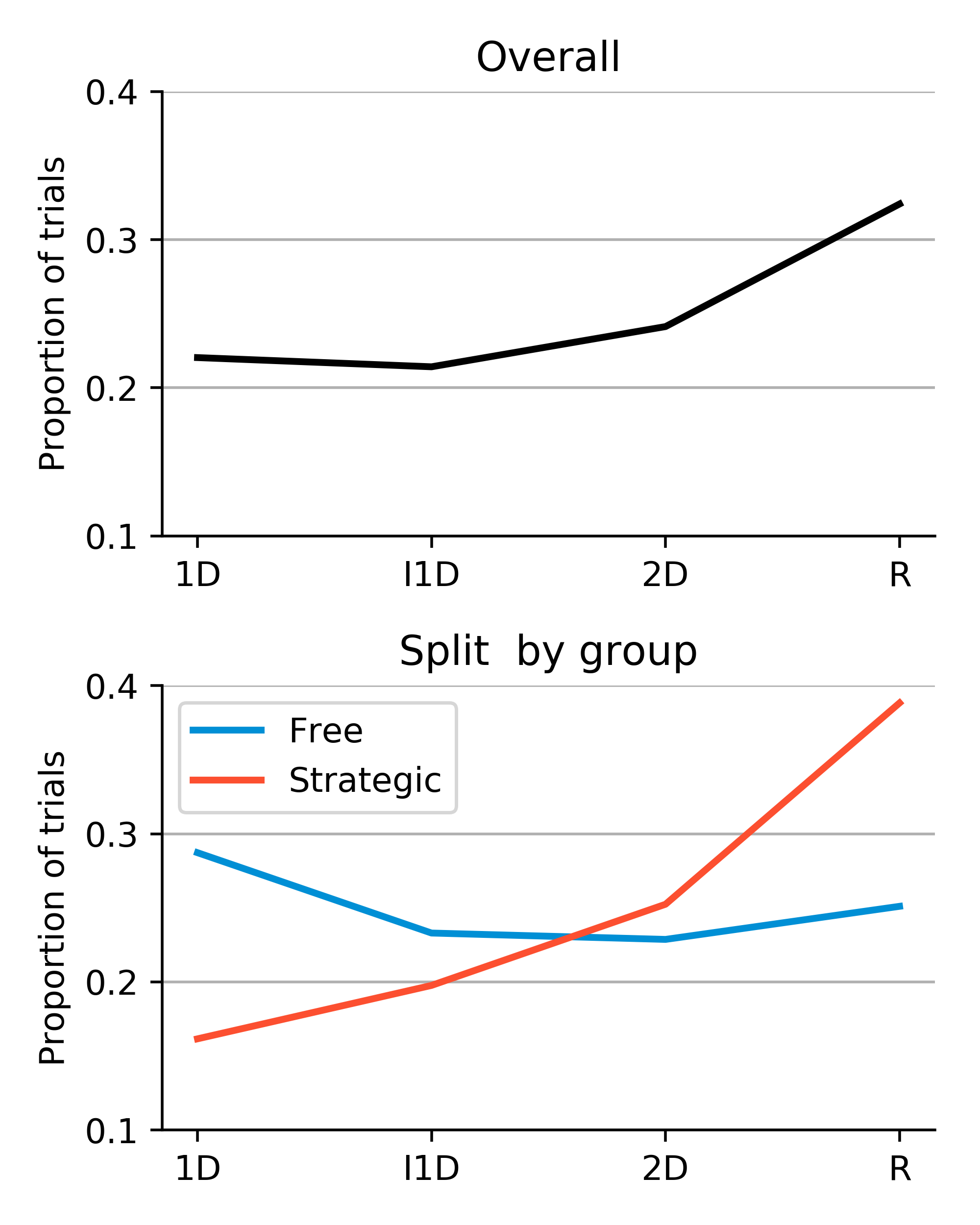
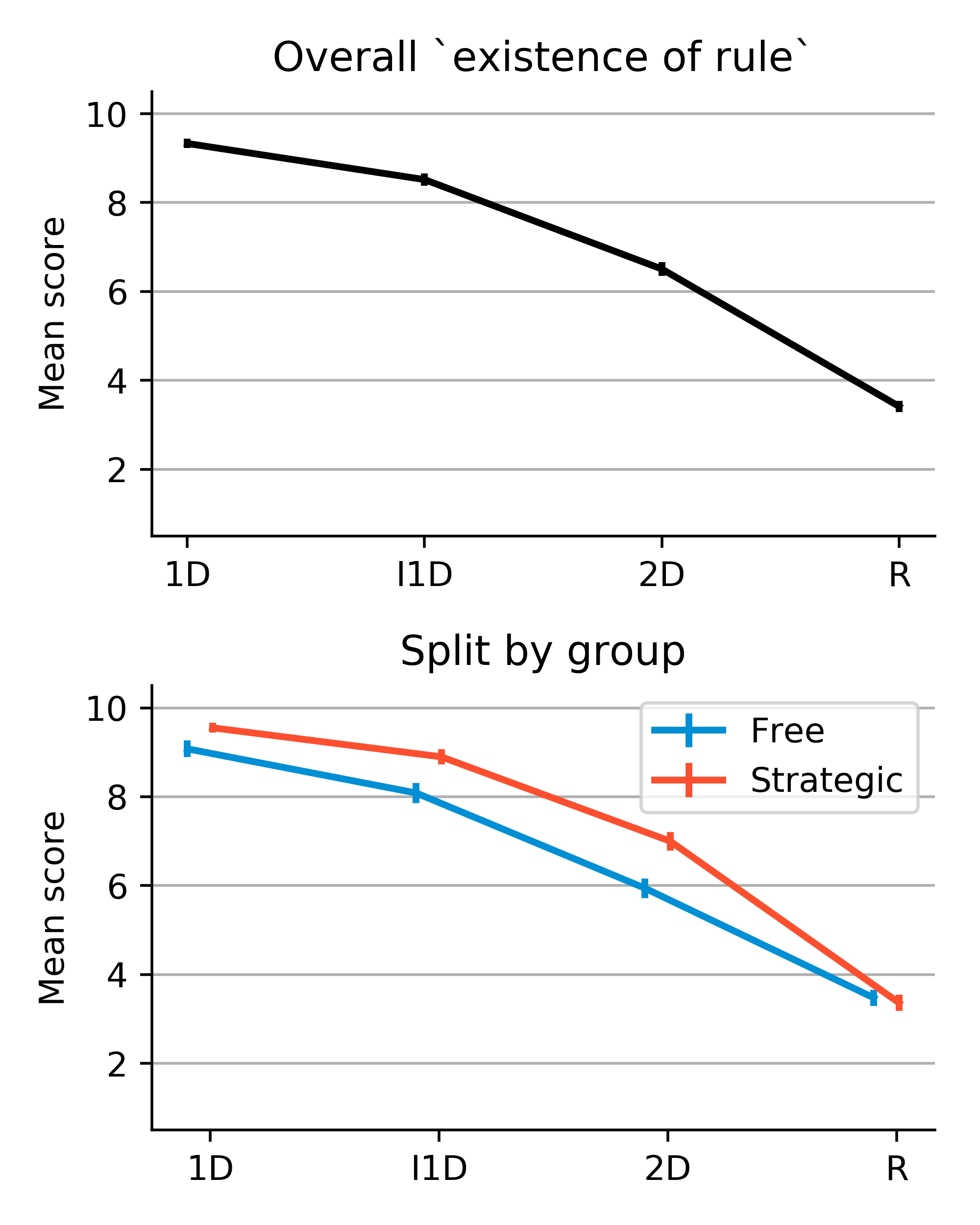
Although, the results of the Active Categorization study are still inconclusive, we found some interesting interim behavioral trends that are worth replicating and investigating. Participants showed preference for tasks of what we intended to be extreme complexity (i.e. too easy or too difficult) by spending more time on them (see figure 8). The group that was instructed to explore freely allocated their time more evenly, but showed a slight preference towards the easiest task where classification was based on a single dimension. The group that was instructed to try to maximize their learning during the experiment and expected a test at the end spent the majority of their time on the hardest (in fact, impossible) task to learn, where class assignment was independent of the two dimensions of variability. This suggests that active sampling strategies are subjected to extraneous constraints, and specifically, that some constraints may lead to inefficient exploration. It also potentially challenges the LP hypothesis, but it is to early to come to any strong conclusions about that, since we do not know how difficulty of the tasks was ranked subjectively by the participants.
|
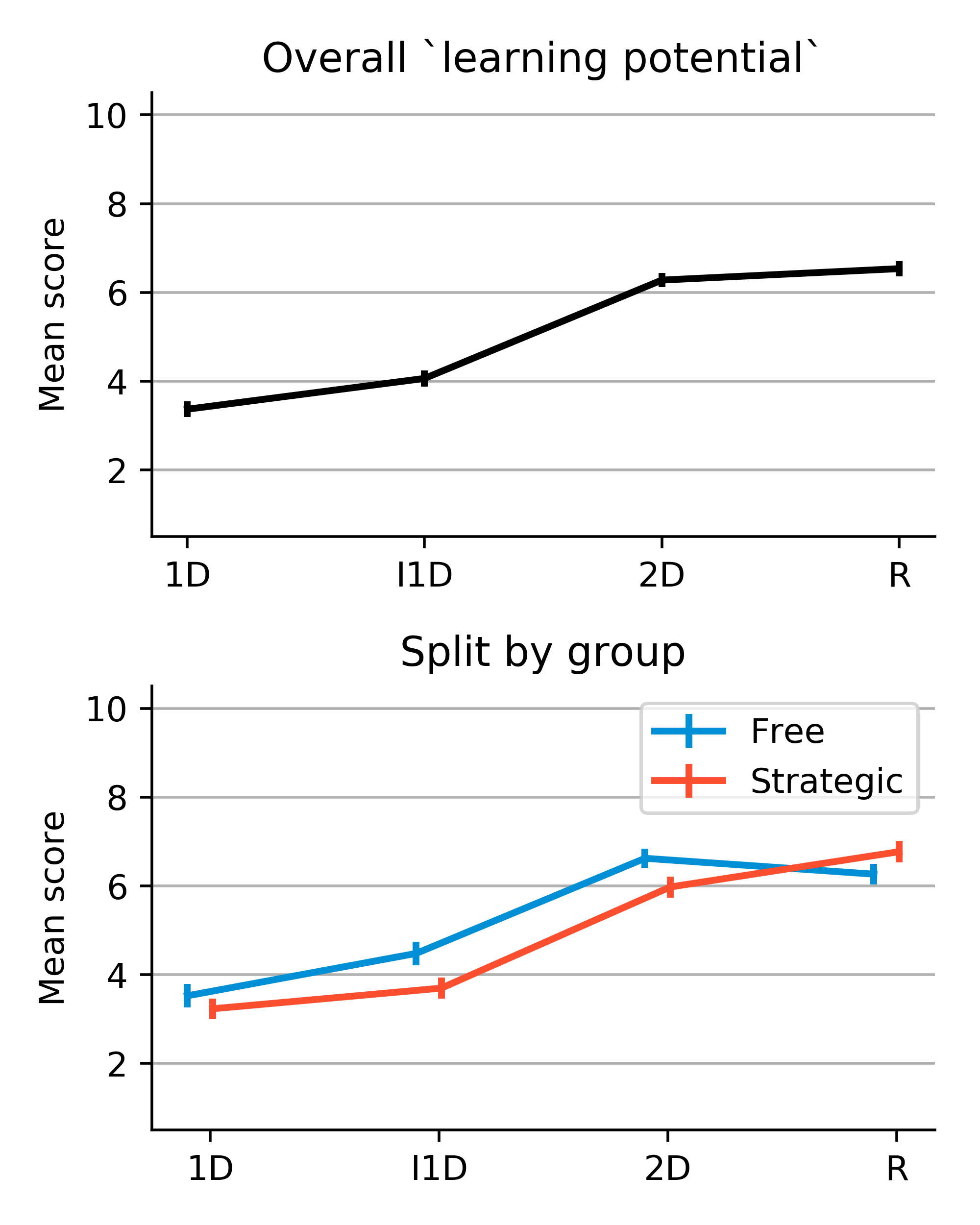
Another puzzling observation comes from self-reported meta-cognitive judgments about the tasks. Figure 9 shows the average (min-max normalized) ratings of future learning potential and sensing the existence of a rule of each task. It is not clear why the learning potential for the hardest task (R) was reported to be high, despite the fact that it was believed to have no rule for classification. On the one hand, it is possible that while participants had not discovered the rule yet, they might have still believed there was a rule to be discovered. On the other hand, participants could really believe tha there was no rule to be discovered, but were not confident in that judgment, so high learning potential relates not to classification per se, but to discovering an interesting aspect of the task itself. There are other competing interpretations. Again, these observations compel us to better understand the contents of knowledge and knowledge-dependent processes used in the task, which we hope to achieve by applying and examining computational cognitive models of learning and meta-cognition.
|
Computational Models Of Tool Use and Speech Development: the Roles of Active Learning, Curiosity and Self-Organization
Participants : Pierre-Yves Oudeyer [correspondant] , Sébastien Forestier, Rémy Portelas.
Modeling Speech and Tool Use Development in Infants
A scientific challenge in developmental and social robotics is to model how autonomous organisms can develop and learn open repertoires of skills in high-dimensional sensorimotor spaces, given limited resources of time and energy. This challenge is important both from the fundamental and application perspectives. First, recent work in robotic modeling of development has shown that it could make decisive contributions to improve our understanding of development in human children, within cognitive sciences [82]. Second, these models are key for enabling future robots to learn new skills through lifelong natural interaction with human users, for example in assistive robotics [127].
In recent years, two strands of work have shown significant advances in the scientific community. On the one hand, algorithmic models of active learning and imitation learning combined with adequately designed properties of robotic bodies have allowed robots to learn how to control an initially unknown high-dimensional body (for example locomotion with a soft material body [53]). On the other hand, other algorithmic models have shown how several social learning mechanisms could allow robots to acquire elements of speech and language [62], allowing them to interact with humans. Yet, these two strands of models have so far mostly remained disconnected, where models of sensorimotor learning were too “low-level” to reach capabilities for language, and models of language acquisition assumed strong language specific machinery limiting their flexibility. Preliminary work has been showing that strong connections are underlying mechanisms of hierarchical sensorimotor learning, artificial curiosity, and language acquisition [128].
Recent robotic modeling work in this direction has shown how mechanisms of active curiosity-driven learning could progressively self-organize developmental stages of increasing complexity in vocal skills sharing many properties with the vocal development of infants [112]. Interestingly, these mechanisms were shown to be exactly the same as those that can allow a robot to discover other parts of its body, and how to interact with external physical objects [122].
In such current models, the vocal agents do not associate sounds to meaning, and do not link vocal production to other forms of action. In other models of language acquisition, one assumes that vocal production is mastered, and hand code the meta-knowledge that sounds should be associated to referents or actions [62]. But understanding what kind of algorithmic mechanisms can explain the smooth transition between the learning of vocal sound production and their use as tools to affect the world is still largely an open question.
The goal of this work is to elaborate and study computational models of curiosity-driven learning that allow flexible learning of skill hierarchies, in particular for learning how to use tools and how to engage in social interaction, following those presented in [122], [53], [117], [112]. The aim is to make steps towards addressing the fundamental question of how speech communication is acquired through embodied interaction, and how it is linked to tool discovery and learning.
We take two approaches to study those questions. One approach is to develop robotic models of infant development by looking at the developmental psychology literature about tool use and speech and trying to implement and test the psychologists' hypotheses about the learning mechanisms underlying infant development. Our second approach is to directly collaborate with developmental psychologists to analyze together the data of their experiments and develop other experimental setup that are well suited to answering modeling questions about the underlying exploration and learning mechanisms. We thus started last year a collaboration with Lauriane Rat-Fischer, a developmental psychologist working on the emergence of tool use in the first years of human life (now in Université Paris-Nanterre). We are currently analyzing together the behaviour of 22 month old infants in a tool use task where the infants have to retrieve a toy put in the middle of a tube by inserting sticks into the tube and pushing the toy out. We are looking at the different actions of the infant with tools and toys but also its looking behaviour, towards the tool, toys or the experimenter, and we are studying the multiple goals and exploration strategies of the babies other than the salient goal that the experimenter is pushing the baby to solve (retrieving a toy inside a tube).
In our recent robotic modeling work, we showed that the Model Babbling learning architecture allows the development of tool use in a robotic setup, through several fundamental ideas. First, goal babbling is a powerful form of exploration to produce a diversity of effects by self-generating goals in a task space. Second, the possible movements of each object define a task space in which to choose goals, and the different task spaces form an object-based representation that facilitates prediction and generalization. Also, cross-learning between tasks updates all skills while exploring one in particular. A novel insight was that early development of tool use could happen without a combinatorial action planning mechanism: modular goal babbling in itself allowed the emergence of nested tool use behaviors.
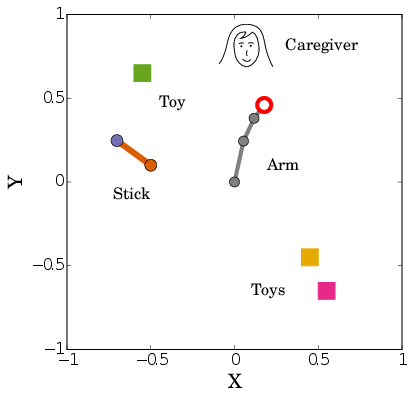
Last year we extended this architecture so that the agent can imitate caregiver's sounds in addition to exploring autonomously [78]. We hypothesized that these same algorithmic ingredients could allow a joint unified development of speech and tool use. Our learning agent is situated in a simulated environment where a vocal tract and a robotic arm are to be explored with the help of a caregiver. The environment is composed of three toys, one stick that can be used as a tool to move toys, and a caregiver moving around. The caregiver helps in two ways. If the agent touches a toy, the caregiver produces this toy's name, but otherwise produces a distractor word as if it was talking to another adult. If the agent produces a sound close to a toy's name, the caregiver moves this toy within agent reach (see Fig. 10).
|
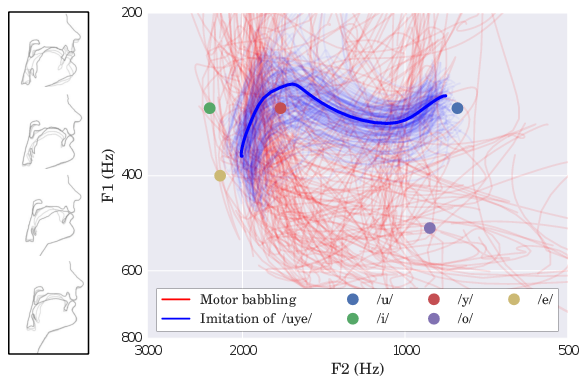
We showed that our learning architecture based on Model Babbling allows agents to learn how to 1) use the robotic arm to grab a toy or a stick, 2) use the stick as a tool to get a toy, 3) learn to produce toy names with the vocal tract, 4) use these vocal skills to get the caregiver to bring a specific toy within reach, and 5) choose the most relevant of those strategies to retrieve a toy that can be out-of-reach. Also, the grounded exploration of toys accelerates the learning of the production of accurate sounds for toy names once the caregiver is able to recognize them and react by bringing them within reach, with respect to distractor sounds without any meaning in the environment. Our model is the first to allow the study of the early development of tool use and speech in a unified framework. It predicts that infants learn to vocalize the name of toys in a natural play scenario faster than learning other words because they often choose goals related to those toys and engage caregiver’s help by trying to vocalize those toys’ names.
This year, we extended that model and we are currently studying on the one hand the impact of a partially contingent caregiver on agent's learning, and on the other hand the impact of attentional windows in agent's sensory perception, to see if and how an attentional window that do not match the time structure of the interaction with the caregiver could impair learning.
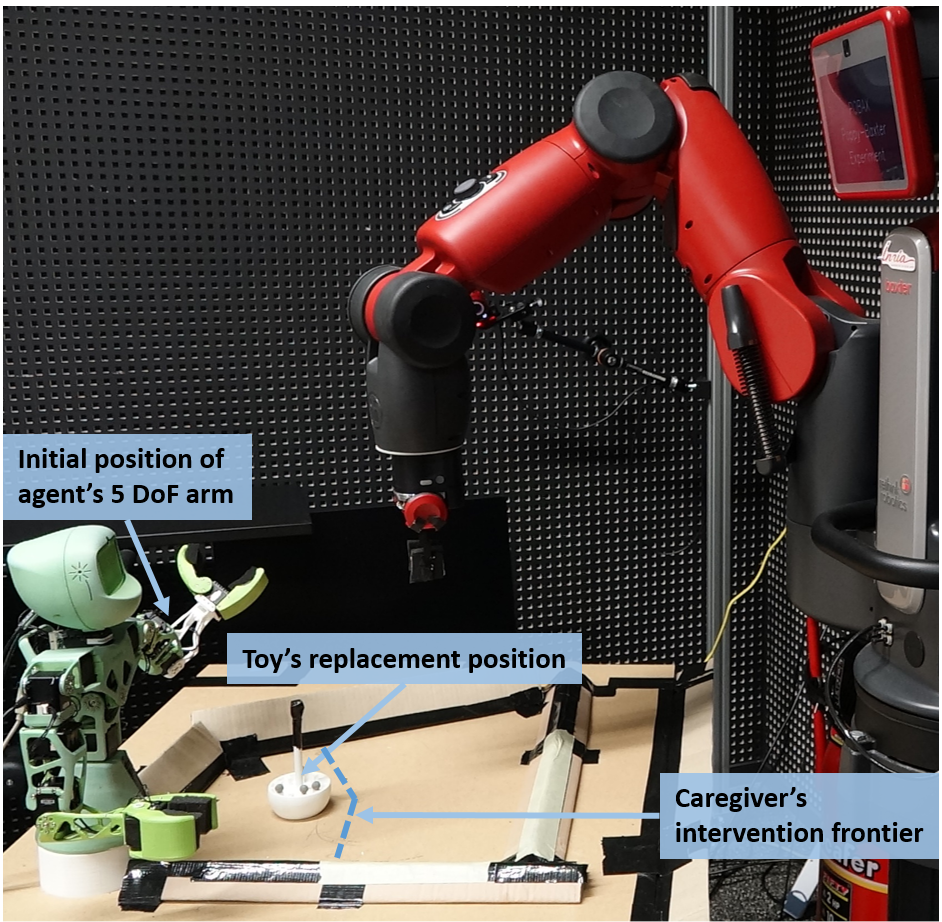
We also transposed this experiment to a real robotic setting during a 6-months research internship dedicated to study how IMGEP approaches scale to a real-world robotic setup. This work is related to ongoing research on simulating human babies’ curiosity-driven learning mechanisms, which objectives are to test psychologists’ hypotheses on human learning and to leverage these models to increase efficiency in reinforcement learning applied to robotics. Previous experiments [78] showed in simulation that intrinsically motivated reinforcement learning could be successfully applied to the early developments of speech and tool-use. The main goal of this internship was to extend this work by designing a real-world robotic experiment using a Poppy-Torso robot and a Baxter. The contributions made during this internship were 1) The design of the Poppy-Baxter robotic playground (see figure [11] including the implementation of the communication architecture using ROS and the modeling of a 3D-printed toy, 2) Tuning of the experiment’s parameters and learning process and 3) Analysis of the results in terms of exploration. Using this setup, we showed that the intrinsically motivated approach to model the early developments of speech and tool use developed in simulation can successfully scale to such a real-world experiment. Our curiosity-driven agents efficiently learned to vocalize the toy's name and to handle it in various and complex ways.
|
Models of Self-organization of lexical conventions: the role of Active Learning and Active Teaching in Naming Games
Participants : William Schueller [correspondant] , Pierre-Yves Oudeyer.
How does language emerge, evolve and gets transmitted between individuals? What mechanisms underly the formation and evolution of linguistic conventions, and what are their dynamics? Computational linguistic studies have shown that local interactions within groups of individuals (e.g. humans or robots) can lead to self-organization of lexica associating semantic categories to words [143]. However, it still doesn't scale well to complex meaning spaces and a large number of possible word-meaning associations (or lexical conventions), suggesting high competition among those conventions.
In statistical machine learning and in developmental sciences, it has been argued that an active control of the complexity of learning situations can have a significant impact on the global dynamics of the learning process [82], [92], [101]. This approach has been mostly studied for single robotic agents learning sensorimotor affordances [123], [113]. However active learning might represent an evolutionary advantage for language formation at the population level as well [128], [145].
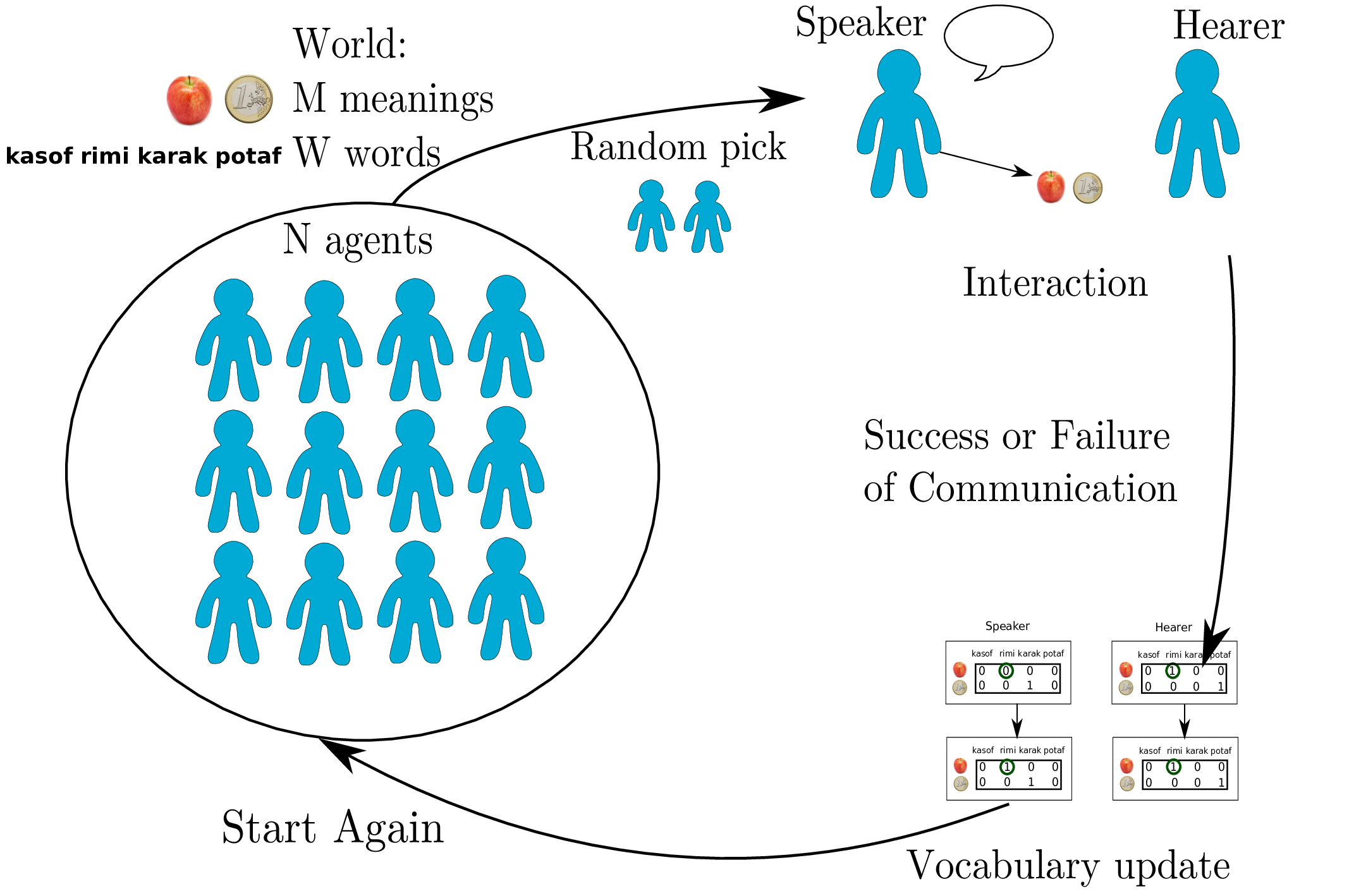
Naming Games are a computational framework, elaborated to simulate the self-organization of lexical conventions in the form of a multi-agent model [144]. Through repeated local interactions between random couples of agents (designated speaker and hearer), shared conventions emerge. Interactions consist of uttering a word – or an abstract signal – referring to a topic, and evaluating the success or failure of communication.
However, in existing works processes involved in these interactions are typically random choices, especially the choice of a communication topic.
The introduction of active learning algorithms in these models produces significant improvement of the convergence process towards a shared vocabulary, with the speaker [121], [140], [67] or the hearer [141] actively controlling vocabulary growth.
|
Active topic choice strategies
Usually, the topic used in an interaction of the Naming Game is picked randomly. A first way of introducing active control of complexity growth is through the mechanism of topic choice: choosing it according to past memory. It allows each agent to balance reinforcement of known associations and invention of new ones, which can be seen as an exploitation vs. exploration problem. This can speed up convergence processes, and even lower significantly local and global complexity: for example in [140], [141], where heuristics based on the number of past successful interactions were used.
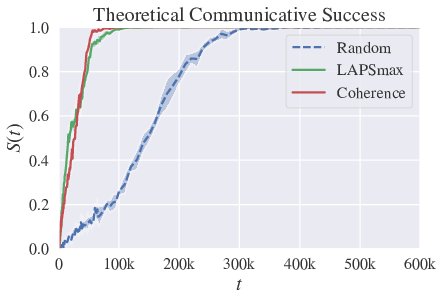
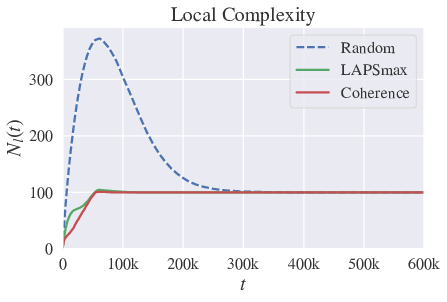
We defined new strategies in [31], [14] based on a maximization of an internal measure called LAPS, or Local Approximated Probability of Success. The derived strategies are called LAPSmax (exact measure but heuristical optimization algorithm) and Coherence (simplified measure but exact optimization).
Those strategies can speed up convergence the convergence process, but also diminish significantly the local complexity – i.e. the maximum number of distinct word-meaning association present in the population. See figure 13.
|
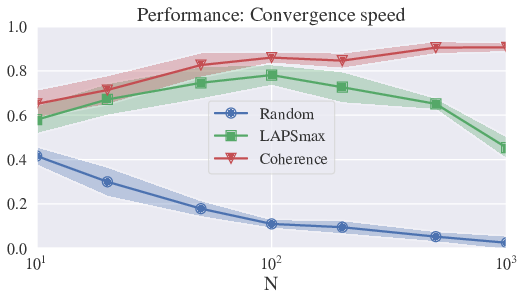
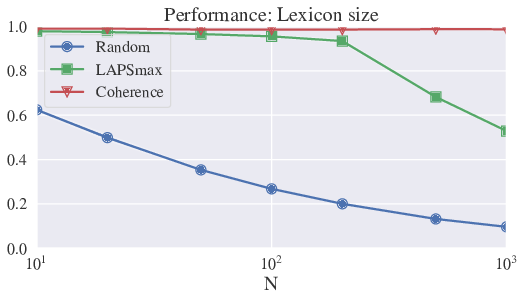
Statistical lower bounds and performance measures
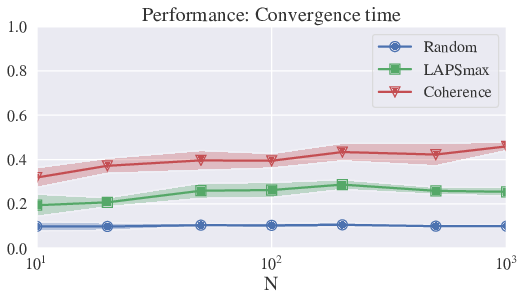
We showed that the time needed to converge to a shared lexicon admits a statistical lower bound [14]:
Where is the number of meanings and the population size.
Using this lower bound, we can define performance measures (between 0 and 1, best value being 1) to classify strategies and compare behavior for different values of the parameters (like population size). We distinguish in particular performance measures for convergence time, convergence speed, and maximum lexicon size. Using this, we can show that LAPSmax and Coherence yield good performance measures, which are stable with population size (cf fig. 14), and significantly better than previous strategies.
|
Interactive application for collaborative creation of a language: Experimenting how humans actively negotiate new linguistic conventions
How do humans agree and negotiate linguistic conventions? This question is at the root of the domain of experimental semiotics [80], which is the context of our experiment/application. Typically, the experiments of this field consist in making human subjects play a game where they have to learn how to interact/collaborate through a new unknown communication medium (such as abstract symbols). In recent years, such experiments allowed to see how new conventions could be formed and evolve in population of individuals, shading light on the origins and evolution of languages [94], [79].
We consider a version of the Naming Game [152], [102], focusing on the influence of active learning/teaching mechanisms on the global dynamics. In particular, agreement is reached sooner when agents actively choose the topic of each interaction [121], [140], [141].
Through this experiment, we confront existing topic choice algorithms to actual human behavior. Participants interact through the mediation of a controlled communication system – a web application – by choosing words to refer to objects. Similar experiments have been conducted in previous work to study the agreement dynamics on a name for a single picture [63]. Here, we make several pictures or interaction topics available, and quantify the extent to which participants actively choose topics in their interactions.
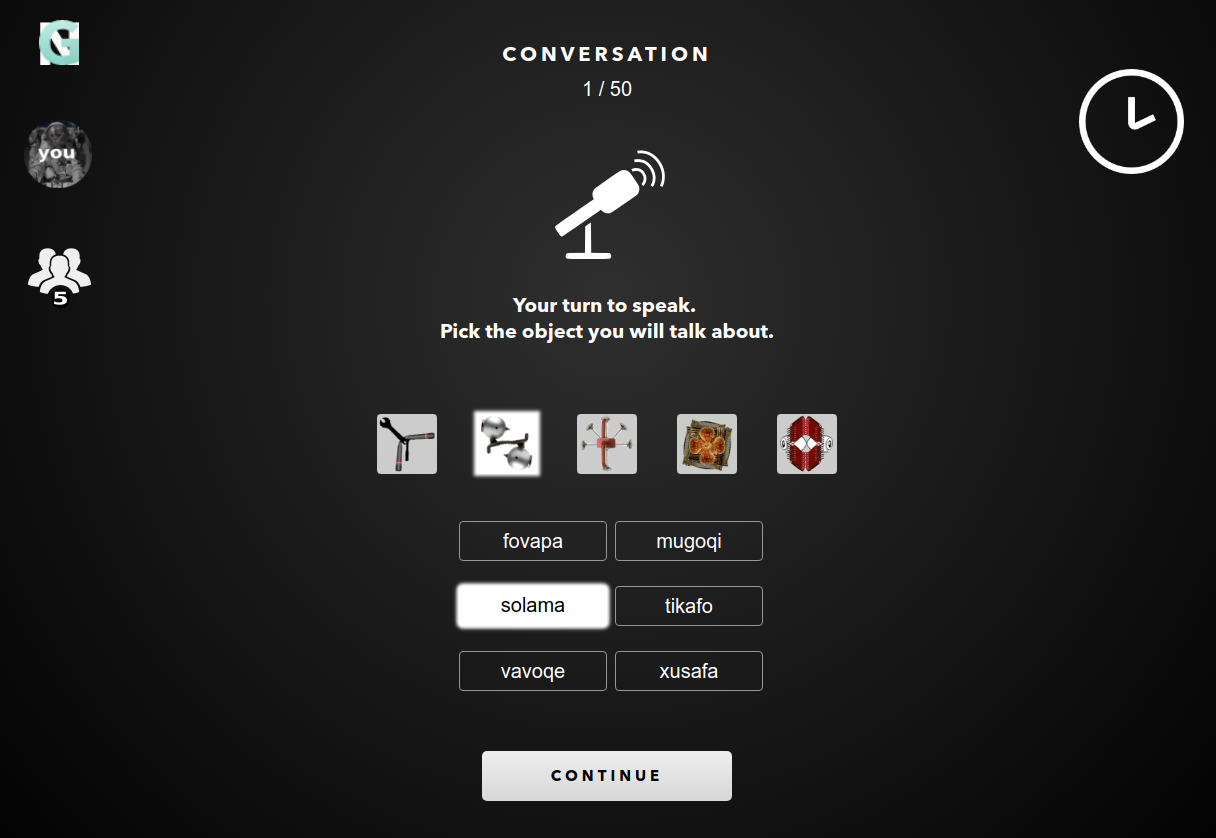
Global description: Each user interacts for about 3-4 min ( <30 interactions) with a brand new population of 4 simulated agents. They take the role of one designated agent, and play the Naming Game as this agent. Each time they interact as speakers, they can select the topics of conversation from a set of 5 objects, and are offered 6 possible words to refer to them. Their choices influence the global emergence of a common lexical convention, reached when communications are successful. The goal is to maximize a score based on the number of successful interactions (among the 50 in total for each run). They can see a list of the past interactions, with chosen topic, chosen word, and whether the interaction was successful or not. This experiment allows us to directly measure if there is a bias in the choice of topics, compared to random choice, based on memory of past interactions. Performance can then be compared to existing topic choice algorithms [121], [140], [141] and [31].
First version: A first version was developed for the Kreyon Conference in Rome, in September 2017. The experiment was however too close to the theoretical model, and users were not motivated to play and finish the experiment. Provided feedback was often perceived as frustrating.
Second version: A second version was developed with the help of Sandy Manolios. This second version is more entertaining, includes a motivating context, a backstory, more adapted feedback, and a more user-friendly visual interface.
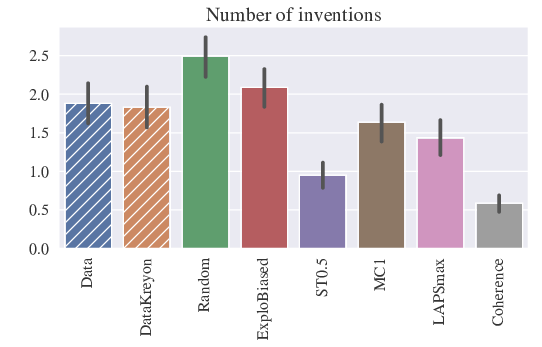
Results: Users in both experiments seem to actively control their rate of invention of new conventions, by selecting more often (than random) objects that they already have a word for. See figure 16.
|