

Section: New Results
Representation Learning
State Representation Learning in the Context of Robotics
Participants : David Filliat [correspondant] , Natalia Diaz Rodriguez, Timothee Lesort, Antonin Raffin, René Traoré, Ashley Hill.
During the DREAM project, we participated in the development of a conceptual framework of open-ended lifelong learning [20] based on the idea of representational re-description that can discover and adapt the states, actions and skills across unbounded sequences of tasks.
In this context, State Representation Learning (SRL) is the process of learning without explicit supervision a representation that is sufficient to support policy learning for a robot. We have finalized and published a large state-of-the-art survey analyzing the existing strategies in robotics control [23], and we have developed unsupervised methods to build representations with the objective to be minimal, sufficient, and that encode the relevant information to solve the task. More concretely, we have developed and open sourced(https://github.com/araffin/robotics-rl-srl) the S-RL toolbox [39] containing baseline algorithms, data generating environments, metrics and visualization tools for assessing SRL methods. The framework has been published at the NIPS workshop on Deep Reinforcement Learning 2018.
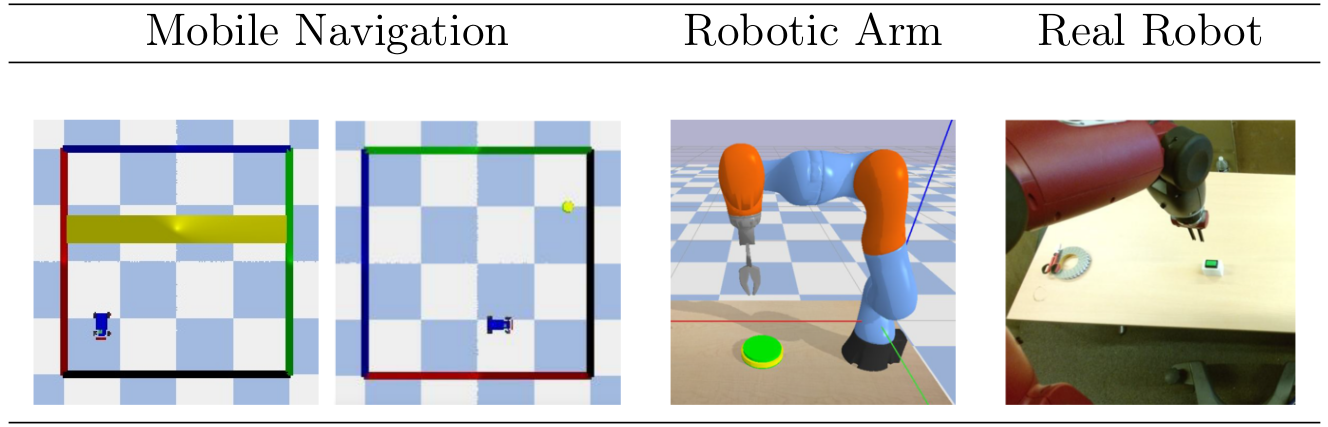
The environments proposed in Fig. 25 are variations of two environments: a 2D environment with a mobile robot and a 3D environment with a robotic arm. In all settings, there is a controlled robot and one or more targets (that can be static, randomly initialized or moving). Each environment can either have a continuous or discrete action space, and the reward can be sparse or shaped, allowing us to cover many different situations.
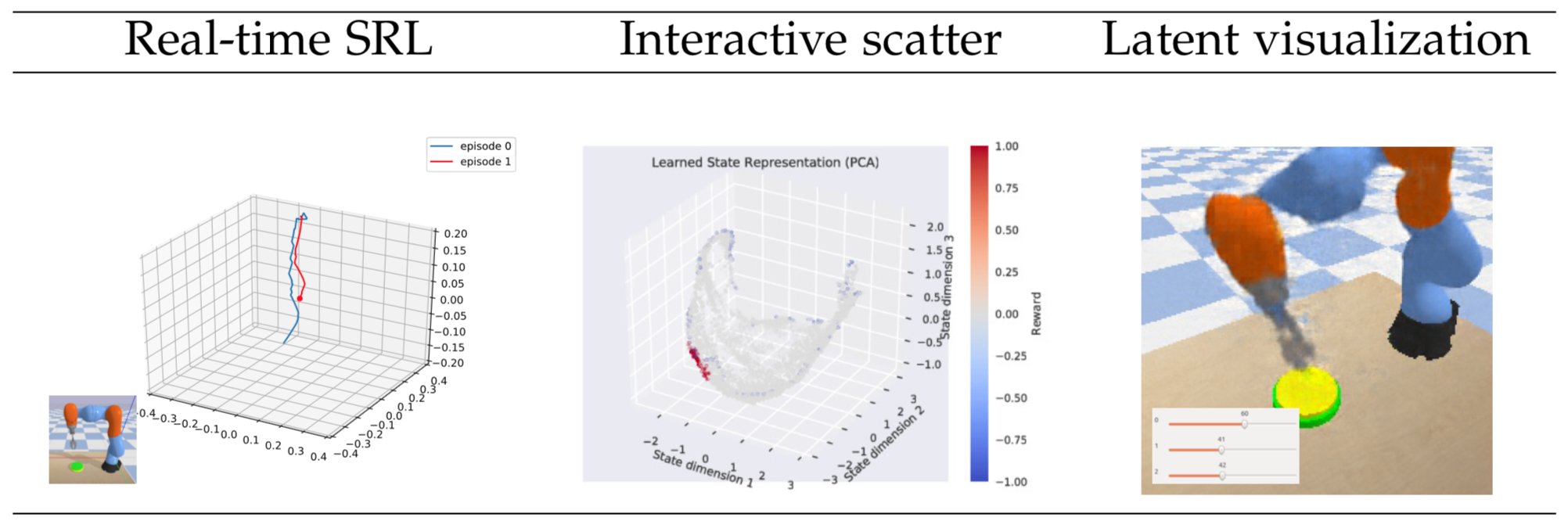
The evaluation and visualization tools are presented in Fig. 26 and make it possible to qualitatively verify the learned state space behavior (e.g., the state representation of the robotic arm dataset is expected to have a continuous and correlated change with respect to the arm tip position).
|
We also proposed a new approach that consists in learning a state representation that is split into several parts where each optimizes a fraction of the objectives. In order to encode both target and robot positions, auto-encoders, reward and inverse model losses are used.
|
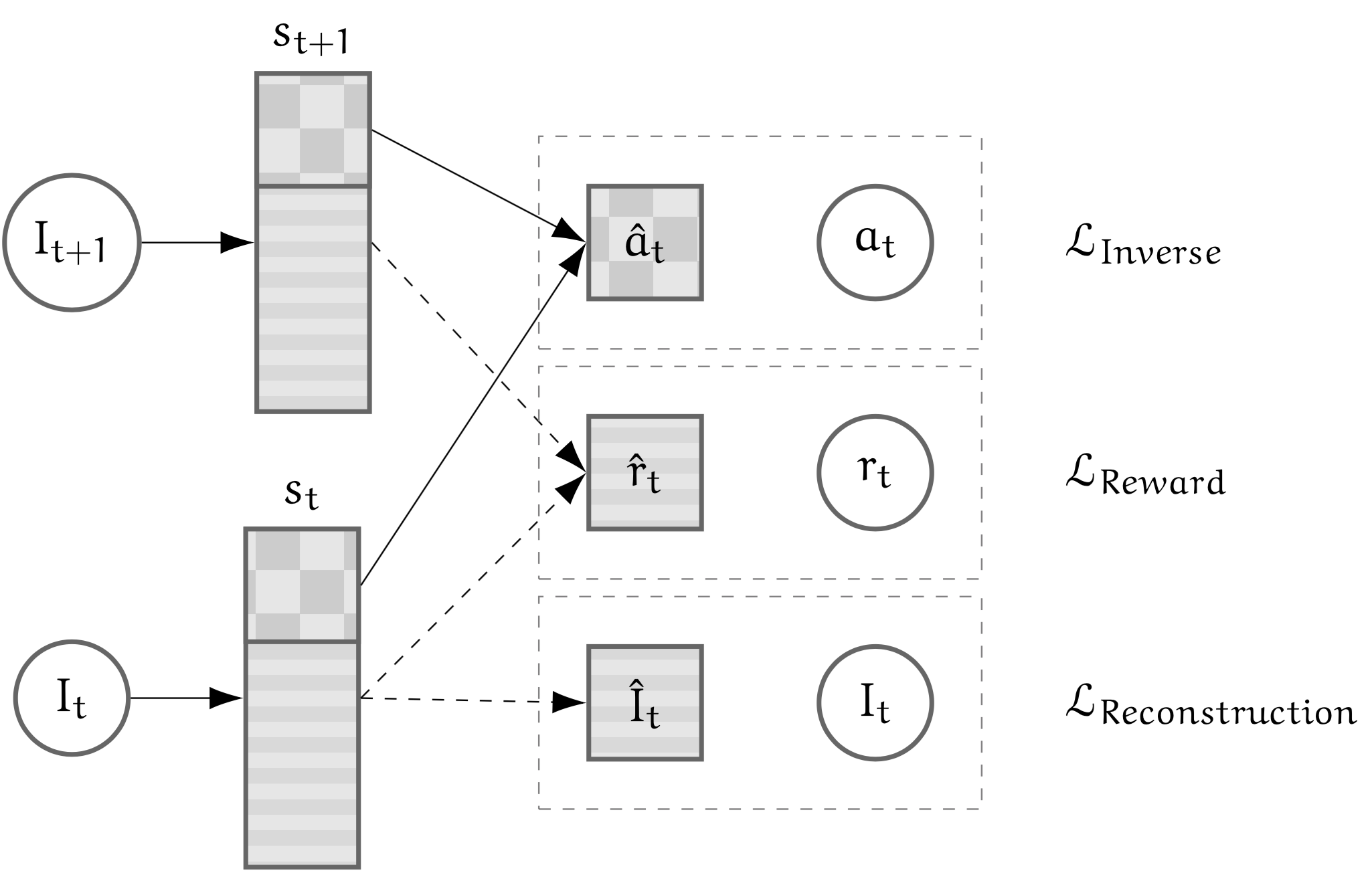
Because combining objectives into a single embedding is not the only option to have features that are sufficient to solve the tasks, by stacking representations, we favor disentanglement of the representation and prevent objectives that can be opposed from cancelling out. This allows a more stable optimization. Fig. 27 shows the split model where each loss is only applied to part of the state representation.
As using the learned state representations in a Reinforcement Learning setting is the most relevant approach to evaluate the SRL methods, we use the developed S-RL framework integrated algorithms (A2C, ACKTR, ACER, DQN, DDPG, PPO1, PPO2, TRPO) from Stable-Baselines [72], Augmented Random Search (ARS), Covariance Matrix Adaptation Evolutionary Strategy (CMA-ES) and Soft Actor Critic (SAC). Due to its stability, we perform extensive experiments on the proposed datasets using PPO and states learned with the approaches described in [39] along with ground truth (GT).
|
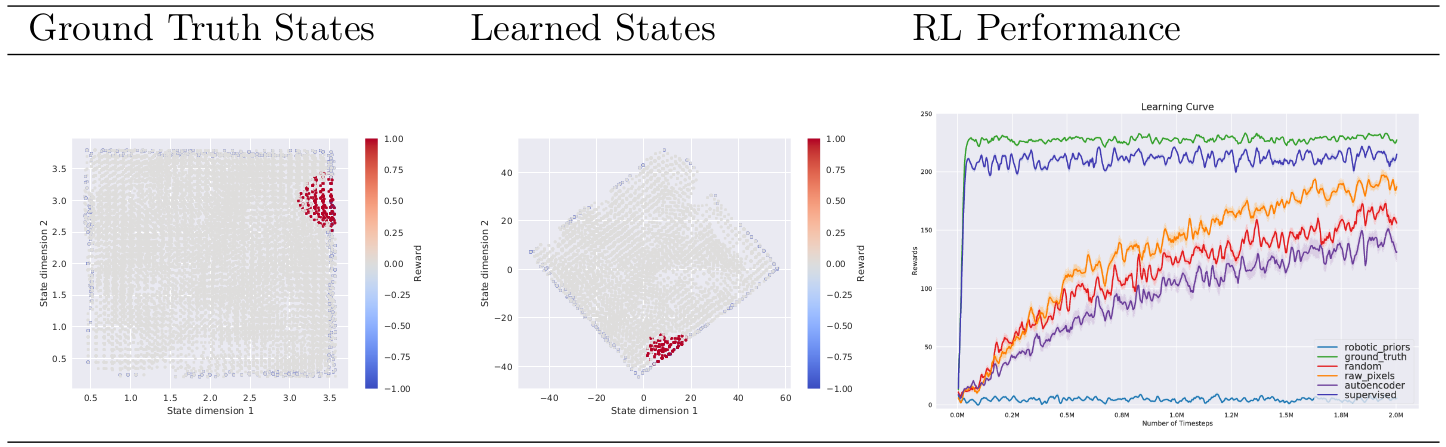
Table 28 illustrates the qualitative evaluation of a state space learned by combining forward and inverse models on the mobile robot environment. It also shows the performance of PPO algorithm based on the states learned by several baseline approaches [39].
|
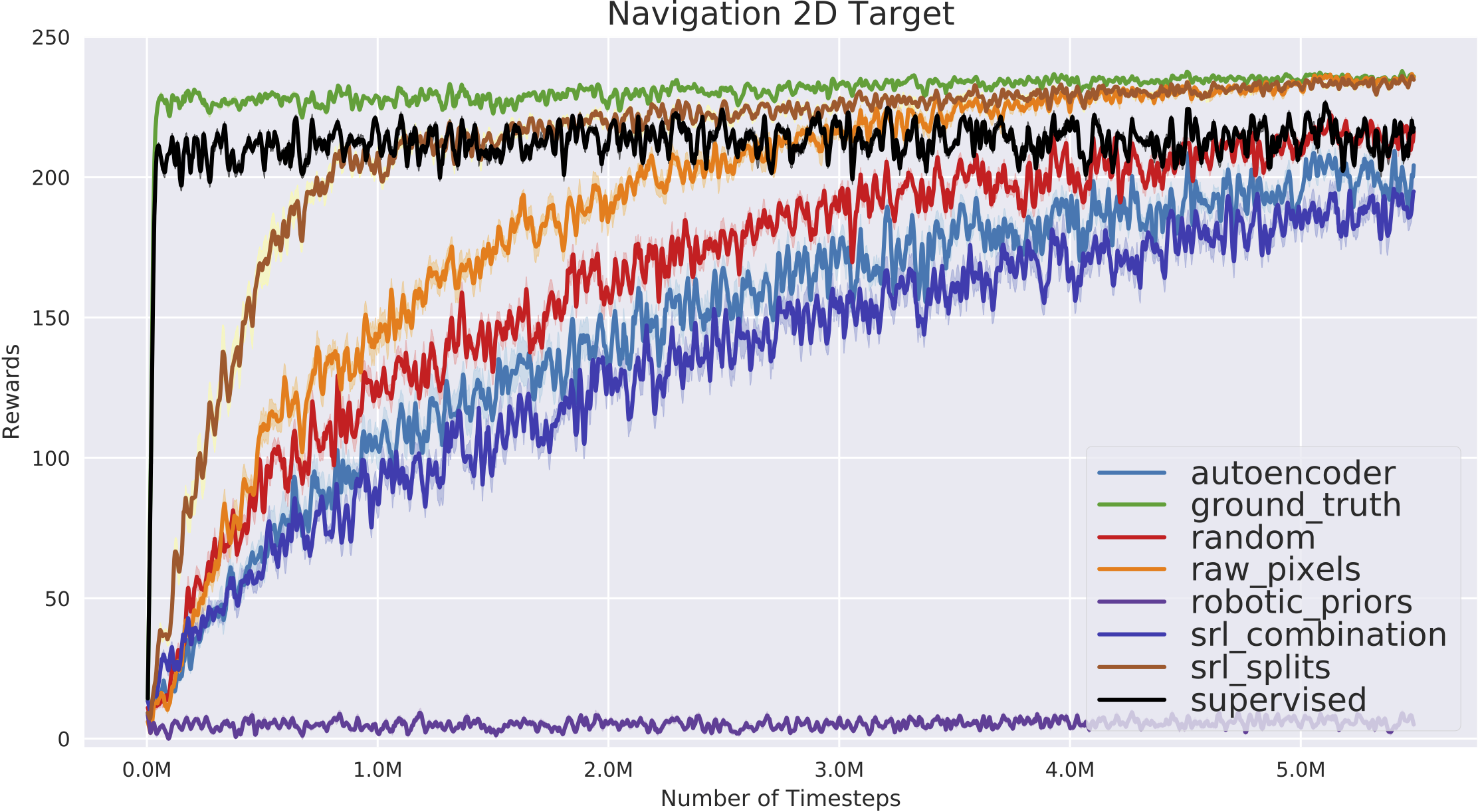
We verified that our new approach (described in Task 2.1) makes it possible for reinforcement learning to converge faster towards the optimal performance in both environments with the same amount of budget timesteps. Learning curve in Fig. 29 shows that our unsupervised state representation learned with the split model even improves on the supervised case.
Continual learning
Participants : David Filliat [correspondant] , Natalia Díaz Rodríguez, Timothee Lesort, Hugo Caselles-Dupré.
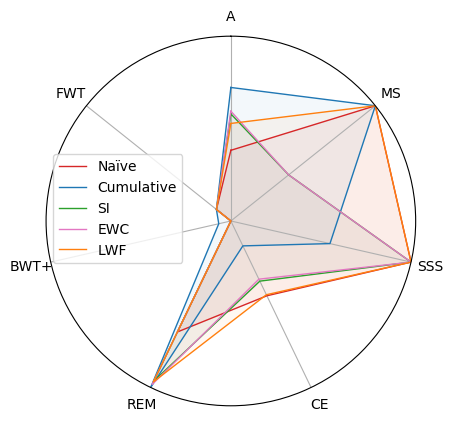
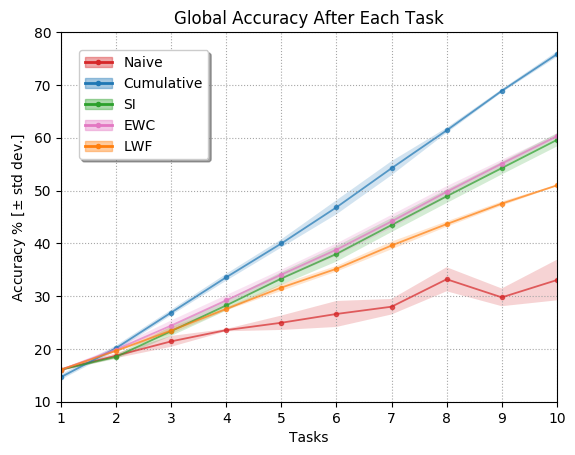
Continual Learning (CL) algorithms learn from a stream of data/tasks continuously and adaptively through time to better enable the incremental development of ever more complex knowledge and skills. The main problem that CL aims at tackling is catastrophic forgetting [108], i.e., the well-known phenomenon of a neural network experiencing a rapid overriding of previously learned knowledge when trained sequentially on new data. This is an important objective quantified for assessing the quality of CL approaches, however, the almost exclusive focus on catastrophic forgetting by continual learning strategies, lead us to propose a set of comprehensive, implementation independent metrics accounting for factors we believe have practical implications worth considering with respect to the deployment of real AI systems that learn continually, and in “Non-static” machine learning settings. In this context we developed a framework and a set of comprehensive metrics [34] to tame the lack of consensus in evaluating CL algorithms. They measure Accuracy (A), Forward and Backward (/remembering) knowledge transfer (FWT, BWT, REM), Memory Size (MS) efficiency, Samples Storage Size (SSS), and Computational Efficiency (CE). Results on iCIFAR-100 classification sequential class learning is in Table 30.
|
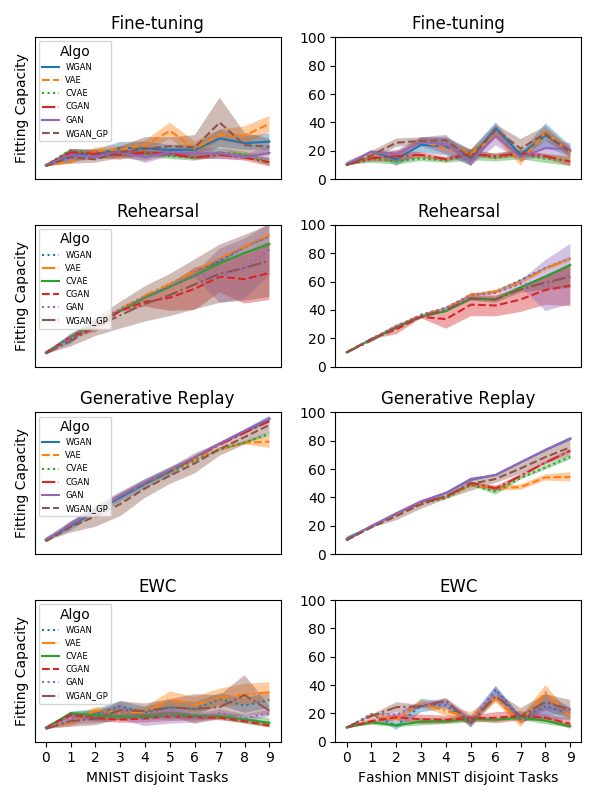
Generative models can also be evaluated from the perspective of Continual learning.This work aims at evaluating and comparing generative models on disjoint sequential image generation tasks. We study the ability of Generative Adversarial Networks (GANS) and Variational Auto-Encoders (VAEs) and many of their variants to learn sequentially in continual learning tasks. We investigate how these models learn and forget, considering various strategies: rehearsal, regularization, generative replay and fine-tuning. We used two quantitative metrics to estimate the generation quality and memory ability. We experiment with sequential tasks on three commonly used benchmarks for Continual Learning (MNIST, Fashion MNIST and CIFAR10). We found (see Figure 32) that among all models, the original GAN performs best and among Continual Learning strategies, generative replay outperforms all other methods. Even if we found satisfactory combinations on MNIST and Fashion MNIST, training generative models sequentially on CIFAR10 is particularly instable, and remains a challenge. This work has been published at the NIPS workshop on Continual Learning 2018.
|
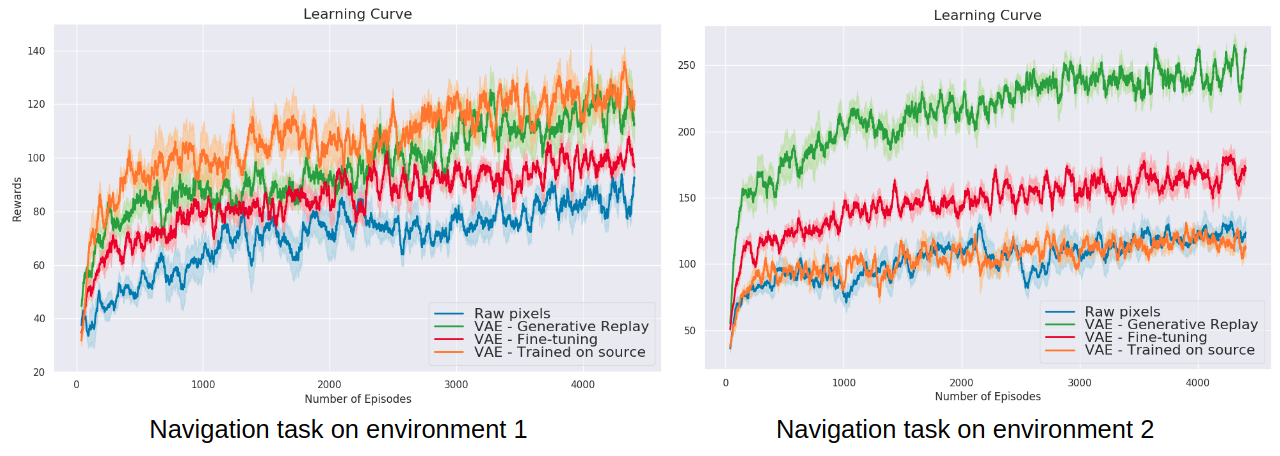
Another extension of previous section on state representation learning (SRL) to the continual learning setting is in our paper [33]. This work proposes a method to avoid catastrophic forgetting when the environment changes using generative replay, i.e., using generated samples to maintain past knowledge. State representations are learned with variational autoencoders and automatic environment change is detected through VAE reconstruction error. Results show that using a state representation model learned continually for RL experiments is beneficial in terms of sample efficiency and final performance, as seen in Figure 32. This work has been published at the NIPS workshop on Continual Learning 2018 and is currently being extended.
The experiments were conducted in an environment built in the lab, called Flatland [32]. This is a lightweight first-person 2-D environment for Reinforcement Learning (RL), designed especially to be convenient for Continual Learning experiments. Agents perceive the world through 1D images, act with 3 discrete actions, and the goal is to learn to collect edible items with RL. This work has been published at the ICDL-Epirob workshop on Continual Unsupervised Sensorimotor Learning 2018, and was accepted as oral presentation.
|
Real life examples of applications envisioned for continual learning include learning on the edge, real time embedded systems, and applications such as the project proposal at the NeurIPS workshop on AI for Good on intelligent drone swarms for search and rescue operations at sea [36].
Knowledge engineering tools for neural-symbolic learning
Participant : Natalia Díaz Rodríguez [correspondant] .
This section includes diverse partners distributed world wide and is result of former stablished collaborations and includes work in the context of knowledge engineering for neural-symbolic learning and reasoning systems. In [35] we presented Datil, a tool for learning fuzzy ontology datatypes based on clustering techniques and fuzzyDL reasoner. Ontologies for modelling healthcare data aggregation as well as knowledge graphs for modelling influence in the fashion domain are concrete ontological proposals for knowledge modelling. The former looks at wearables data interoperability for Ambient Assisted Living application development, including concepts such as height, weight, locations, activities, activity levels, activity energy expenditure, heart rate, or stress levels, among others [41]. The second proposal, considers the intrinsic subjectivity needed to effectively model subjective domains such as fashion in recommendations systems. Subjective influence networks are proposed to better quantify influence and novelty in networks. A set of use cases this approach is intended to address is discussed, as well as possible classes of prediction questions and machine learning experiments that could be executed to validate or refute the model [40].