

Section: New Results
Automatic camera calibration using multiple sets of pairwise correspondences
|
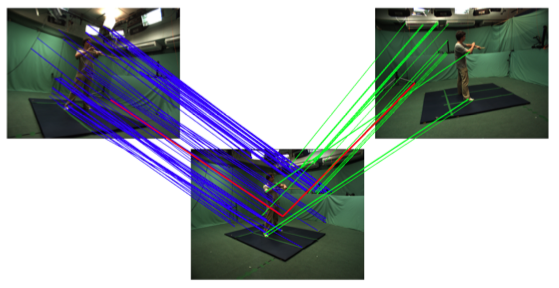
We propose a new method to add an uncalibrated node into a network of calibrated cameras using only pairwise point correspondences (see figure 5). While previous methods perform this task using triple correspondences, these are often difficult to establish when there is limited overlap between different views. In such challenging cases we must rely on pairwise correspondences and our solution becomes more advantageous. Our method includes an 11-point minimal solution for the intrinsic and extrinsic calibration of a camera from pairwise correspondences with other two calibrated cameras, and a new inlier selection framework that extends the traditional RANSAC family of algorithms to sampling across multiple datasets. Our method is validated on different application scenarios where a lack of triple correspondences might occur: addition of a new node to a camera network; calibration and motion estimation of a moving camera inside a camera network; and addition of views with limited overlap to a Structure-from-Motion model.
This result was published in a prominent medical journal, IEEE Transactions on Pattern Analysis and Machine Intelligence [5].