

Section: New Results
Using Attention to Address Human-Robot Motion
Participants : Thierry Fraichard, Rémi Paulin, Patrick Reignier.
To capture the specificity of robot motion among people, we choose the term Human-Robot Motion (HRM) (In reference to Human-Robot Interaction (HRI), i.e. the study of the interactions, in the broad sense of the word, between people and robots.), to denote the study of how robots should move among people. HRM is about designing robots whose motions are deemed socially acceptable from a human point of view while remaining safe.
After 15 years of research on HRM, the main concept that has emerged is that of social spaces, i.e. regions of the environment that people consider as psychologically theirs [33], any intrusion in their social space will be a source of discomfort. Such social spaces are characterized by the position of the person, i.e. “Personal Space”, or the activity they are currently engaged in, i.e. “Interaction Space” and “Activity Space”. The most common approach in HRM is to define costmaps on such social spaces: the higher the cost, the less desirable it is to be there. The costmaps are then used for navigation purposes, e.g. [37] and [36].
Social spaces are of course relevant to HRM but they have limitations. First, it is not straightforward to define them; what is their shape or size, especially in cluttered environments? Second, it seems obvious that there is more to acceptability than geometry only: the appearance of a robot and its velocity will also influence the way it is perceived by people. Finally, social spaces can be conflicting because when a robot needs to interact with a person, it is very likely that it will have to penetrate a social space.
To complement social spaces, we have started to explore whether human attention could be useful to address HRM vis-à-vis the acceptability aspect. Why attention? The answer is straightforward: the acceptability of a robot motion is directly related to the way it is perceived by a person hence our interest in human attention. For a person, attention is a cognitive mechanism for filtering the person's sensory information (to avoid an overwhelming amount of information) [35]. It controls where and to what the person's attentional resources are allocated.
In 2014, we introduced the concept of attention field, i.e. a predictor of the amount of attention that a person allocates to the robot when the robot is in a given state. In [32], the attention field was computed thanks to a computational model of attention proposed in [34] in the context of ambient applications and pervasive systems. In this model, attentional resources are focused on a single specific area of the person's visual space (as per the zoom lens model [31]). Later studies have demonstrated that the situation is more complex and that attentional resources can be distributed over multiple objects in the visual space [35].
|
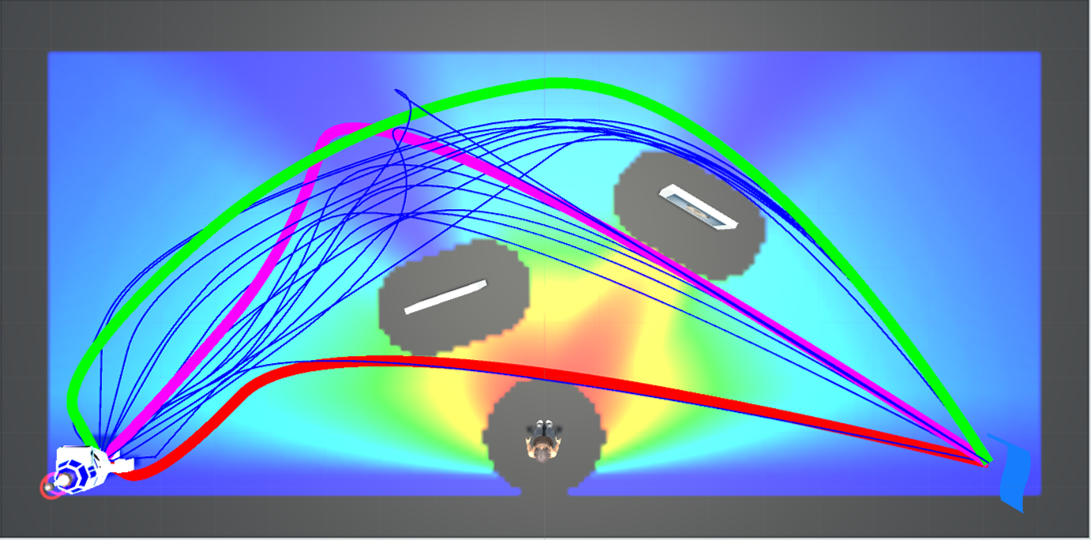
In 2018, we have developed a novel computational model of attention that takes this property into account. This model is used to compute the attention field for a robot. The attention field is then used to define different attentional properties for the robot's motions such as distraction or surprise. The relevance of the attentional properties for HRM have been demonstrated on a proof-of-concept acceptable motion planner on various case studies where a robot is assigned different tasks. The multi-criteria nature of motion planning in the context of HRM led to the design of an acceptable motion planner based upon a state-of-the-art many-objective optimization algorithm. It shows how to compute acceptable motions that are non-distracting and non-surprising, but also motions that convey the robot's intention to interact with a person. All these contributions have been presented in the PhD of Rémi Paulin [6] and the conference article [26].