

Section: New Results
Bayesian Reasoning
Participants : Emmanuel Mazer, Raphael Frisch, Marvin Faix, Augustin Lux, Didier Piau, Jeremy Belot.
To overcome the ever growing needs in computing power, alternative computing paradigms have been developed such as stochastic architectures. These latter have found substantial interests for energy efficient implementations in artificial intelligence. In particular, mixing stochastic computing with Bayesian models makes a promising paradigm for non-conventional computational architectures dedicated to Bayesian inference. The ability to deal with uncertainty and adapt its computational accuracy is some of the advantages of these computing approaches.
During 2018 we have designed a first hardware prototype to localize a sound source with a stochastic machine. The goal of this project was to provide a proof of concept of stochastic machines by implementing an autonomous platform of sound source localization. It includes an sound acquisition module, a pre-processing circuit, and the stochastic machine. The platform has been implemented on an Altera Cyclone V FPGA and validated functionally with digital simulations. Several optimization to improve size and power consumption have been proposed. Results in terms of computation time, power and used FPGA resources allowed to assess their impact on future design. The same architecture of stochastic machine was also analyzed in simulation to provide design guidelines for our next design [25].
Further, we have proposed a way to reduce the memory needs of our architecture by sharing a memory between the processing units (in collaboration with TIMA and C2M -Université Paris Sud ). This optimization reduces the area and the cost of our architecture. However, its impact on power consumption is not obvious. Therefore, we designed an integrated circuit (ASIC) with our original and optimized proposals. We synthesized the VHDL description of the circuit in the FDSOI 28nm technology from STMicroelectronics. Notice that the memory has been implemented thanks to a SRAM memory compiler. The results highlight that the optimized machine significantly reduces both the circuit area (by 30% ) and the power consumption (by 35% ). Nevertheless, the simulations showed that, in the optimized version, the memory represents nearly 60 % of our circuit area and more than 55% of the power consumption. According to the latest literature, the Magnetic Random Access Memory (MRAM) technology provides some promising features and would approximately reduce by a factor of 20 the memory area. Moreover, this feature should drastically impact the power consumption. Thus, our future works will focus on the implementation of Bayesian machines using MRAM instead of SRAM. A poster describing this work was presented at the International Conference on rebooting Computing.
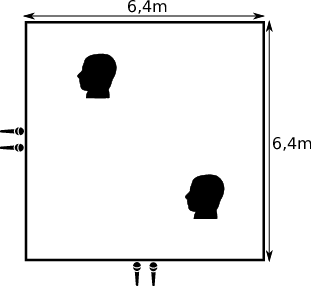
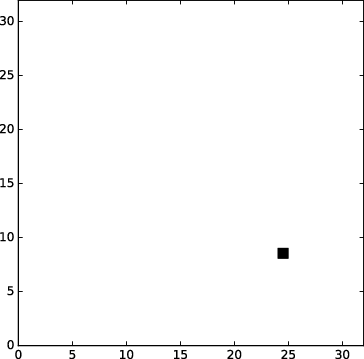
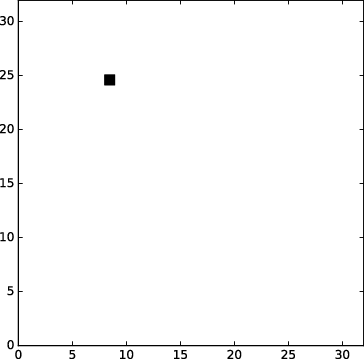
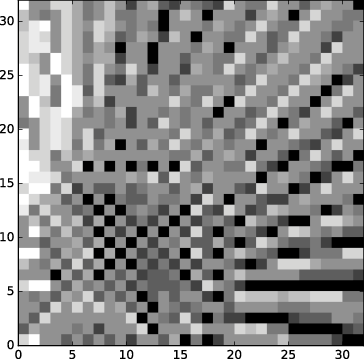
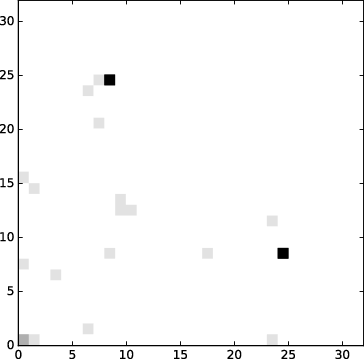
We have proposed (in collaboration with ISIR - Université Paris Sorbonne)a new way to localize several sound sources using a Bayesian model. This multi-source localization algorithm is fast and can readily be implemented on our stochastic machine (Paper submitted at ICASSP 2019). The Figure 2 shows the location of the source and of the microphones in the simulated environment. The Figure 3 shows the posterior distribution of the location of one source using a short frame and the Figure 4 shows the result using fifty frames. As the frame are very short the localization of the two sources is readily obtained and it is used as a bootstrap for the source separation algorithm .
|
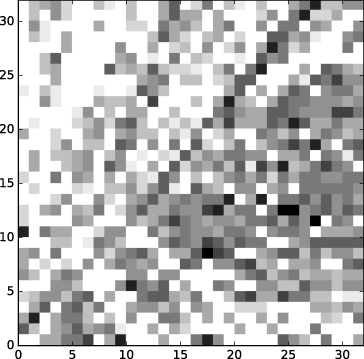
|
We devised and successfully tested a Bayesian model for the source separation problem. The model assumes the localization of the sources are known. The inference - retrieving the sound emitted by each source from the mixed signals obtained with several microphones - takes place in a very high dimensional space. Nevertheless, the Gibbs algorithm is well suited to solve the problem when the location of the sources are known. A very efficient implementation of this algorithm was tested with a realistic sound simulator using human voices. The algorithm can be implemented on a sampling machine and the corresponding stochastic architecture has been devised. It is currently implemented on an FPGA.