

Section: Dissemination
Popularization
Internal or external Inria responsibilities
David Sherman is president of the Commission for Technology Development (CDT) of the Inria Bordeaux Sud-Ouest research center. The CDT has two roles. First, it evaluates funding requests for Technology Development and Technology Transfer projects, which typically involve hiring technical staff. Second, the CDT is responsible for validating and overseeing contract engineers hired by Inria project-teams.
Interventions
The “Family-3D” activity (see below) was presented on three occasions:
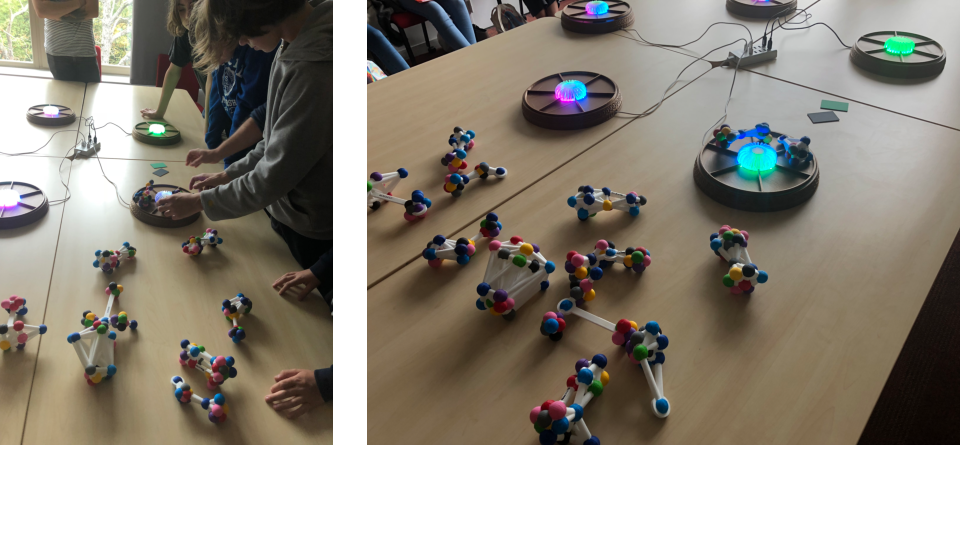
Creation of media or tools for science outreach
Pleiade created an interactive activity “Family-3D” to explain the methods and uses of pattern classification of protein families. Using new software developed by the team we laid out 30 families in 3D space and converting those shapes to 3D volumes. The selected families had been previously grouped into biologically pertinent classes by human curators. Each shape was printed with an embedded unique RFID tag. We also designed and printed five interactive terminals, containing a microcontroller, an RFID reader with a custom-designed inductive coil as input, and an LED ring as output. Participants would propose groups of shapes that they believed belonged to the same class, and the terminal would evaluate the group.
David Sherman contributes open-source software development to the Aseba platform for educational robotics (http://aseba.io/), deployed in Thymio II robots used by children as well as in the simulator used by Class'Code (https://pixees.fr/classcode-la-formation-associee-a-pixees/) to train teachers.
David Sherman and Louise-Amélie Schmitt developed AsebaHub, a specialized WiFi hub for connecting Thymio-II robots into a local-area network. AsebaHub acts as either a wireless Access Point to which users may connect, or as a Bridge to an existing local-area network. Robots can be discovered using mDNS-sd (Zeroconf/Bonjour). AsebaHub works out of the box with the Aseba Studio and VPL programming environments, and can also provide an HTTP service that is compatible with Scratch, Snap!, or other environments.