Section: New Results
Visual Recognition in Images and Videos
Actor and Observer: Joint Modeling of First and Third-Person Videos
Participants : Gunnar Sigurdsson [CMU] , Abhinav Gupta [CMU] , Cordelia Schmid, Ali Farhadi [AI2, Univ. Washington] , Karteek Alahari.
Several theories in cognitive neuroscience suggest that when people interact with the world, or simulate interactions, they do so from a first-person egocentric perspective, and seamlessly transfer knowledge between third-person (observer) and first-person (actor). Despite this, learning such models for human action recognition has not been achievable due to the lack of data. Our work in [33] takes a step in this direction, with the introduction of Charades-Ego, a large-scale dataset of paired first-person and third-person videos, involving 112 people, with 4000 paired videos. This enables learning the link between the two, actor and observer perspectives. Thereby, we address one of the biggest bottlenecks facing egocentric vision research, providing a link from first-person to the abundant third-person data on the web. We use this data to learn a joint representation of first and third-person videos, with only weak supervision, and show its effectiveness for transferring knowledge from the third-person to the first-person domain.
Learning to Segment Moving Objects
Participants : Pavel Tokmakov, Cordelia Schmid, Karteek Alahari.
We study the problem of segmenting moving objects in unconstrained videos [14]. Given a video, the task is to segment all the objects that exhibit independent motion in at least one frame. We formulate this as a learning problem and design our framework with three cues: (i) independent object motion between a pair of frames, which complements object recognition, (ii) object appearance, which helps to correct errors in motion estimation, and (iii) temporal consistency, which imposes additional constraints on the segmentation. The framework is a two-stream neural network with an explicit memory module. The two streams encode appearance and motion cues in a video sequence respectively , while the memory module captures the evolution of objects over time, exploiting the temporal consistency. The motion stream is a convolutional neural network trained on synthetic videos to segment independently moving objects in the optical flow field. The module to build a visual memory in video, i.e., a joint representation of all the video frames, is realized with a convolutional recurrent unit learned from a small number of training video sequences. For every pixel in a frame of a test video, our approach assigns an object or background label based on the learned spatio-temporal features as well as the `visual memory' specific to the video. We evaluate our method extensively on three benchmarks, DAVIS, Freiburg-Berkeley motion seg-mentation dataset and SegTrack. In addition, we provide an extensive ablation study to investigate both the choice of the training data and the influence of each component in the proposed framework. An overview of our model is shown in Figure 1.
|

Unsupervised Learning of Artistic Styles with Archetypal Style Analysis
Participants : Daan Wynen, Cordelia Schmid, Julien Mairal.
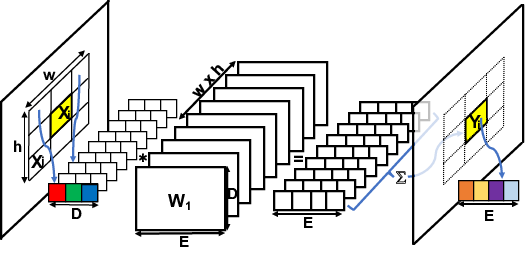
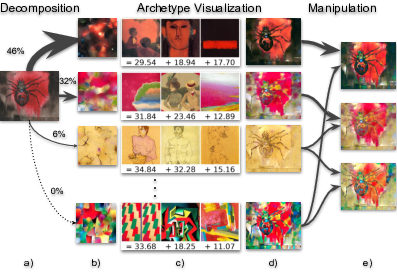
In [36], we introduce an unsupervised learning approach to automatically discover, summarize, and manipulate artistic styles from large collections of paintings. Our method (summarized in Figure 2) is based on archetypal analysis, which is an unsupervised learning technique akin to sparse coding with a geometric interpretation. When applied to neural style representations from a collection of artworks, it learns a dictionary of archetypal styles, which can be easily visualized. After training the model, the style of a new image, which is characterized by local statistics of deep visual features, is approximated by a sparse convex combination of archetypes. This enables us to interpret which archetypal styles are present in the input image, and in which proportion. Finally, our approach allows us to manipulate the coefficients of the latent archetypal decomposition, and achieve various special effects such as style enhancement, transfer, and interpolation between multiple archetypes.
|
Learning from Web Videos for Event Classification
Participants : Nicolas Chesneau, Karteek Alahari, Cordelia Schmid.
Traditional approaches for classifying event videos rely on a manually curated training dataset. While this paradigm has achieved excellent results on benchmarks such as TrecVid multimedia event detection (MED) challenge datasets, it is restricted by the effort involved in careful annotation. Recent approaches have attempted to address the need for annotation by automatically extracting images from the web, or generating queries to retrieve videos. In the former case, they fail to exploit additional cues provided by video data, while in the latter, they still require some manual annotation to generate relevant queries. We take an alternate approach in [4], leveraging the synergy between visual video data and the associated textual metadata, to learn event classifiers without manually annotating any videos. Specifically, we first collect a video dataset with queries constructed automatically from textual description of events, prune irrelevant videos with text and video data, and then learn the corresponding event classifiers. We evaluate this approach in the challenging setting where no manually annotated training set is available, i.e., EK0 in the TrecVid challenge, and show state-of-the-art results on MED 2011 and 2013 datasets.
How good is my GAN?
Participants : Konstantin Shmelkov, Cordelia Schmid, Karteek Alahari.
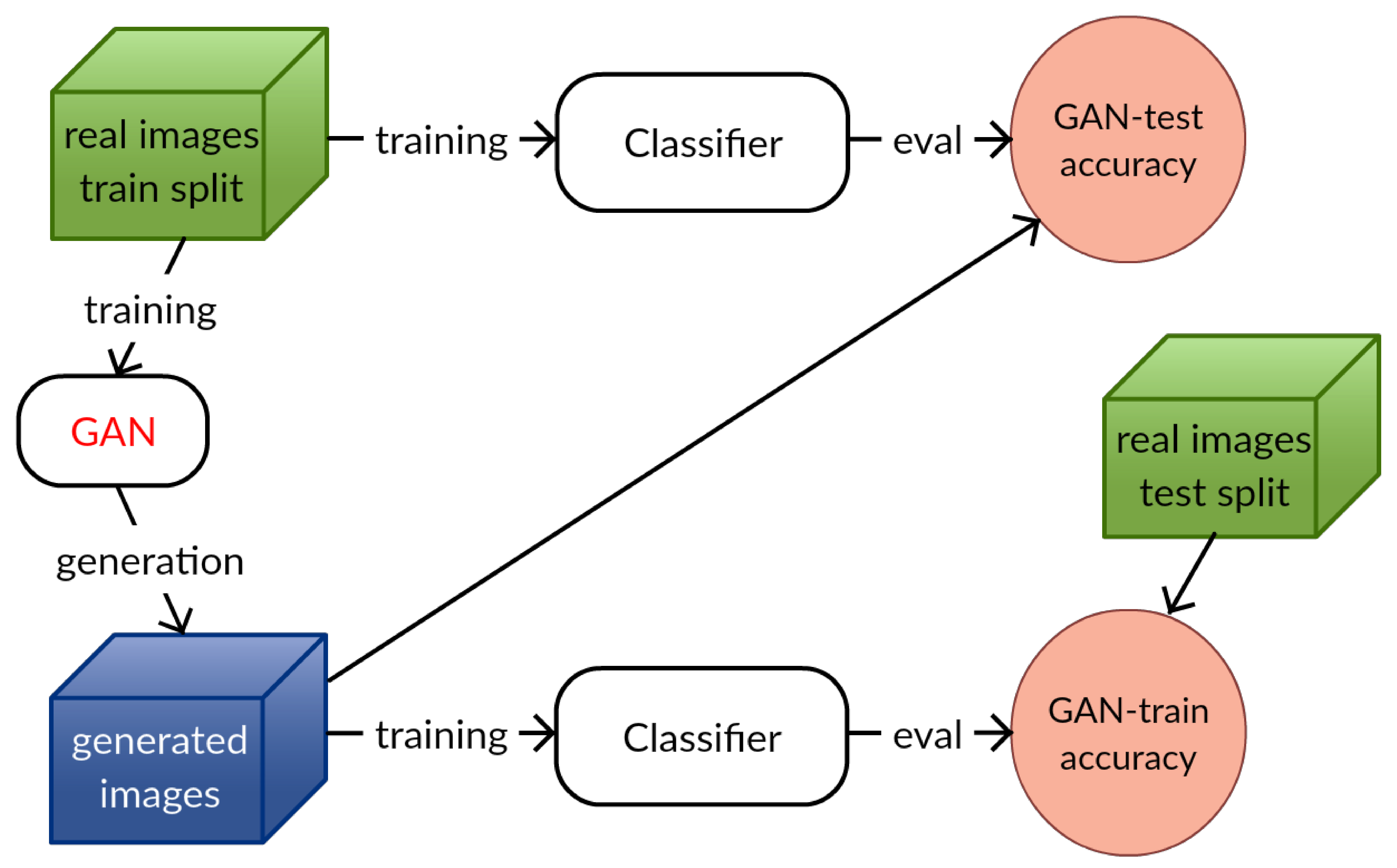
Generative adversarial networks (GANs) are one of the most popular methods for generating images today. While impressive results have been validated by visual inspection, a number of quantitative criteria have emerged only recently. We argue here that the existing ones are insufficient and need to be in adequation with the task at hand. In [32] introduce two measures based on image classification—GAN-train and GAN-test (illustrated in Figure 3), which approximate the recall (diversity) and precision (quality of the image) of GANs respectively. We evaluate a number of recent GAN approaches based on these two measures and demonstrate a clear difference in performance. Furthermore, we observe that the increasing difficulty of the dataset, from CIFAR10 over CIFAR100 to ImageNet, shows an inverse correlation with the quality of the GANs, as clearly evident from our measures.
|
Modeling Visual Context is Key to Augmenting Object Detection Datasets
Participants : Nikita Dvornik, Julien Mairal, Cordelia Schmid.
Performing data augmentation for learning deep neural networks is well known to be important for training visual recognition systems. By artificially increasing the number of training examples, it helps reducing overfitting and improves generalization. For object detection, classical approaches for data augmentation consist of generating images obtained by basic geometrical transformations and color changes of original training images. In [23], we go one step further and leverage segmentation annotations to increase the number of object instances present on training data. For this approach to be successful, we show that modeling appropriately the visual context surrounding objects is crucial to place them in the right environment. Otherwise, we show that the previous strategy actually hurts. Clear difference between the two approaches can is presented in Figure 4. With our context model, we achieve significant mean average precision improvements when few labeled examples are available on the VOC'12 benchmark.
|
On the Importance of Visual Context for Data Augmentation in Scene Understanding
Participants : Nikita Dvornik, Julien Mairal, Cordelia Schmid.
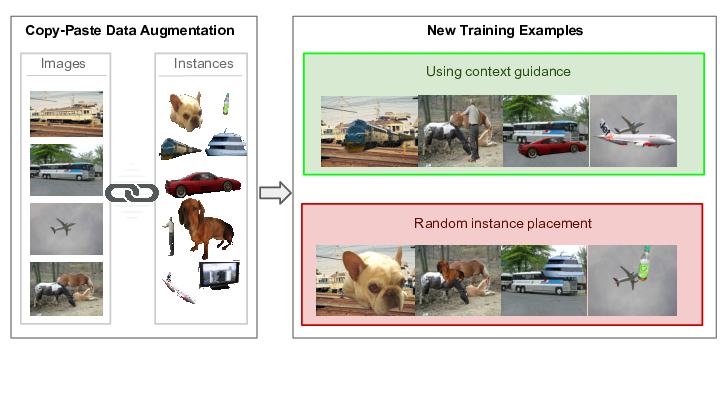
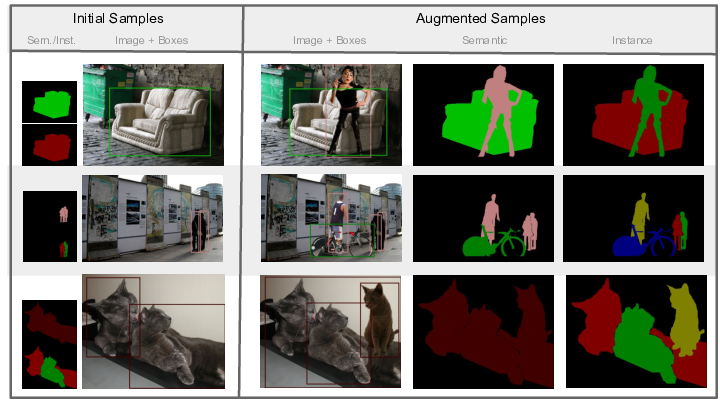
Performing data augmentation for learning deep neural networks is known to be important for training visual recognition systems. By artificially increasing the number of training examples, it helps reducing overfitting and improves generalization. While simple image transformations such as changing color intensity or adding random noise can already improve predictive performance in most vision tasks, larger gains can be obtained by leveraging task-specific prior knowledge. In [42], we consider object detection and semantic segmentation and augment the training images by blending objects in existing scenes, using instance segmentation annotations. We observe that randomly pasting objects on images hurts the performance, unless the object is placed in the right context. To resolve this issue, we propose an explicit context model by using a convolutional neural network, which predicts whether an image region is suitable for placing a given object or not. In our experiments, we show that by using copy-paste data augmentation with context guidance we are able to improve detection and segmentation on the PASCAL VOC12 and COCO datasets, with significant gains when few labeled examples are available. The way to augment for different tasks and annotations is presented in Figure 5. We also show that the method is not limited to datasets that come with expensive pixel-wise instance annotations and can be used when only bounding box annotations are available, by employing weakly-supervised learning for instance masks approximation.
|
Predicting future instance segmentation by forecasting convolutional features
Participants : Pauline Luc, Camille Couprie [Facebook AI Research] , Yann Lecun [Facebook AI Research] , Jakob Verbeek.
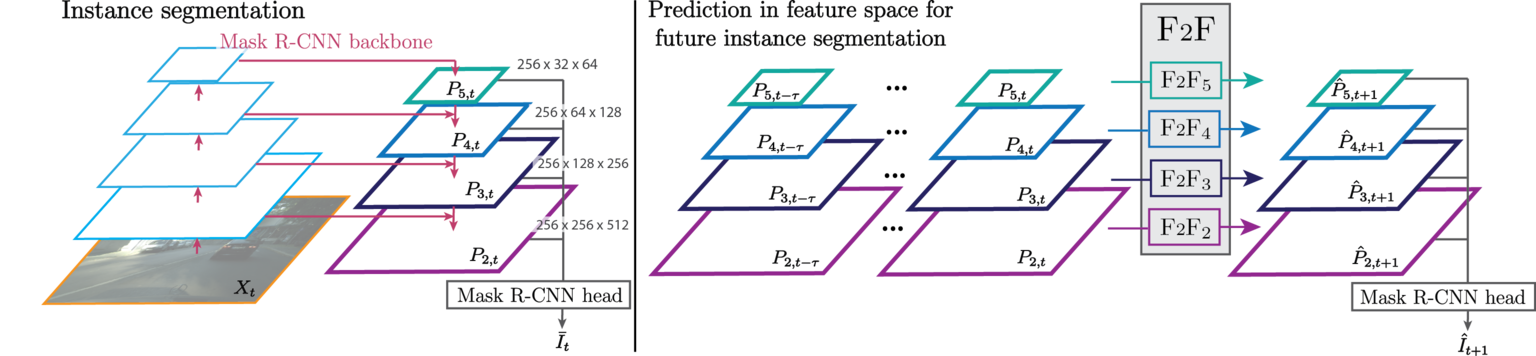
Anticipating future events is an important prerequisite towards intelligent behavior. Video forecasting has been studied as a proxy task towards this goal. Recent work has shown that to predict semantic segmentation of future frames, forecasting at the semantic level is more effective than forecasting RGB frames and then segmenting these. In [28], we consider the more challenging problem of future instance segmentation, which additionally segments out individual objects. To deal with a varying number of output labels per image, we develop a predictive model in the space of fixed-sized convolutional features of the Mask R-CNN instance segmentation model. We apply the “detection head” of Mask R-CNN on the predicted features to produce the instance segmentation of future frames. Experiments show that this approach significantly improves over strong baselines based on optical flow and repurposed instance segmentation architectures. We show an overview of the proposed method in Figure 6.
|
Joint Future Semantic and Instance Segmentation Prediction
Participants : Camille Couprie [Facebook AI Research] , Pauline Luc, Jakob Verbeek.
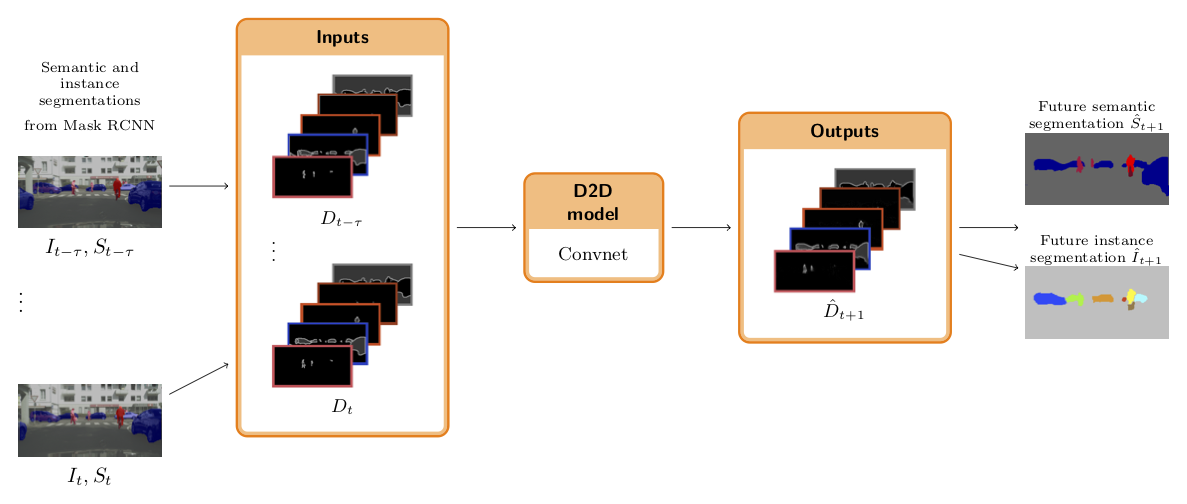
The ability to predict what will happen next from observing the past is a key component of intelligence. Methods that forecast future frames were recently introduced towards better machine intelligence. However, predicting directly in the image color space seems an overly complex task, and predicting higher level representations using semantic or instance segmentation approaches were shown to be more accurate. In [20], we introduce a novel prediction approach that encodes instance and semantic segmentation information in a single representation based on distance maps. Our graph-based modeling of the instance segmentation prediction problem allows us to obtain temporal tracks of the objects as an optimal solution to a watershed algorithm. Our experimental results on the Cityscapes dataset present state-of-the-art semantic segmentation predictions, and instance segmentation results outperforming a strong baseline based on optical flow. We show an overview of the proposed method in Figure 7.
|
Depth-based Hand Pose Estimation: Methods, Data, and Challenges
Participants : James S. Supancic [UC Irvine] , Grégory Rogez, Yi Yang [Baidu Research] , Jamie Shotton [Microsoft Research] , Deva Ramanan [Carnegie Mellon University] .
Hand pose estimation has matured rapidly in recent years. The introduction of commodity depth sensors and a multitude of practical applications have spurred new advances. In [13], we provide an extensive analysis of the state-of-the-art, focusing on hand pose estimation from a single depth frame. We summarize important conclusions here: (1) Pose estimation appears roughly solved for scenes with isolated hands. However, methods still struggle to analyze cluttered scenes where hands may be interacting with nearby objects and surfaces. To spur further progress we introduce a challenging new dataset with diverse, cluttered scenes. (2) Many methods evaluate themselves with disparate criteria , making comparisons difficult. We define a consistent evaluation criteria, rigorously motivated by human experiments. (3) We introduce a simple nearest-neighbor baseline that outperforms most existing systems (see results in Fig. 8). This implies that most systems do not generalize beyond their training sets. This also reinforces the under-appreciated point that training data is as important as the model itself. We conclude with directions for future progress.
|

Image-based Synthesis for Deep 3D Human Pose Estimation
Participants : Grégory Rogez, Cordelia Schmid.
In [11], we address the problem of 3D human pose estimation in the wild. A significant challenge is the lack of training data, i.e., 2D images of humans annotated with 3D poses. Such data is necessary to train state-of-the-art CNN architectures. Here, we propose a solution to generate a large set of photorealistic synthetic images of humans with 3D pose annotations. We introduce an image-based synthesis engine that artificially augments a dataset of real images with 2D human pose annotations using 3D Motion Capture (MoCap) data. Given a candidate 3D pose our algorithm selects for each joint an image whose 2D pose locally matches the projected 3D pose. The selected images are then combined to generate a new synthetic image by stitching local image patches in a kinematically constrained manner. See examples in Figure 9. The resulting images are used to train an end-to-end CNN for full-body 3D pose estimation. We cluster the training data into a large number of pose classes and tackle pose estimation as a K-way classification problem. Such an approach is viable only with large training sets such as ours. Our method outperforms the state of the art in terms of 3D pose estimation in controlled environments (Human3.6M) and shows promising results for in-the-wild images (LSP). This demonstrates that CNNs trained on artificial images generalize well to real images. Compared to data generated from more classical rendering engines, our synthetic images do not require any domain adaptation or fine-tuning stage.
|

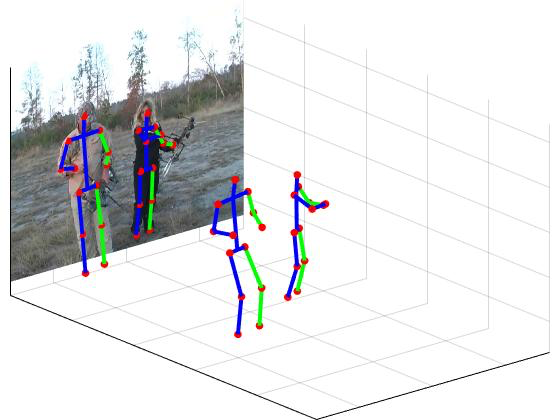
LCR-Net++: Multi-person 2D and 3D Pose Detection in Natural Images
Participants : Grégory Rogez, Philippe Weinzaepfel [Naver Labs Europe] , Cordelia Schmid.
In [12], we propose an end-to-end architecture for joint 2D and 3D human pose estimation in natural images. Key to our approach is the generation and scoring of a number of pose proposals per image, which allows us to predict 2D and 3D pose of multiple people simultaneously. See example in Figure 10. Hence, our approach does not require an approximate localization of the humans for initialization. Our architecture, named LCR-Net, contains 3 main components: 1) the pose proposal generator that suggests potential poses at different locations in the image; 2) a classifier that scores the different pose proposals ; and 3) a regressor that refines pose proposals both in 2D and 3D. All three stages share the convolutional feature layers and are trained jointly. The final pose estimation is obtained by integrating over neighboring pose hypotheses , which is shown to improve over a standard non maximum suppression algorithm. Our approach significantly outperforms the state of the art in 3D pose estimation on Human3.6M, a controlled environment. Moreover, it shows promising results on real images for both single and multi-person subsets of the MPII 2D pose benchmark and demonstrates satisfying 3D pose results even for multi-person images.
|
Link and code: Fast indexing with graphs and compact regression codes
Participants : Matthijs Douze [Facebook AI Research] , Alexandre Sablayrolles, Hervé Jégou [Facebook AI Research] .
Similarity search approaches based on graph walks have recently attained outstanding speed-accuracy trade-offs, taking aside the memory requirements. In [21], we revisit these approaches by considering, additionally, the memory constraint required to index billions of images on a single server. This leads us to propose a method based both on graph traversal and compact representations. We encode the indexed vectors using quantization and exploit the graph structure to refine the similarity estimation, see Figure 11. In essence, our method takes the best of these two worlds: the search strategy is based on nested graphs, thereby providing high precision with a relatively small set of comparisons. At the same time it offers a significant memory compression. As a result, our approach outperforms the state of the art on operating points considering 64–128 bytes per vector, as demonstrated by our results on two billion-scale public benchmarks.
|
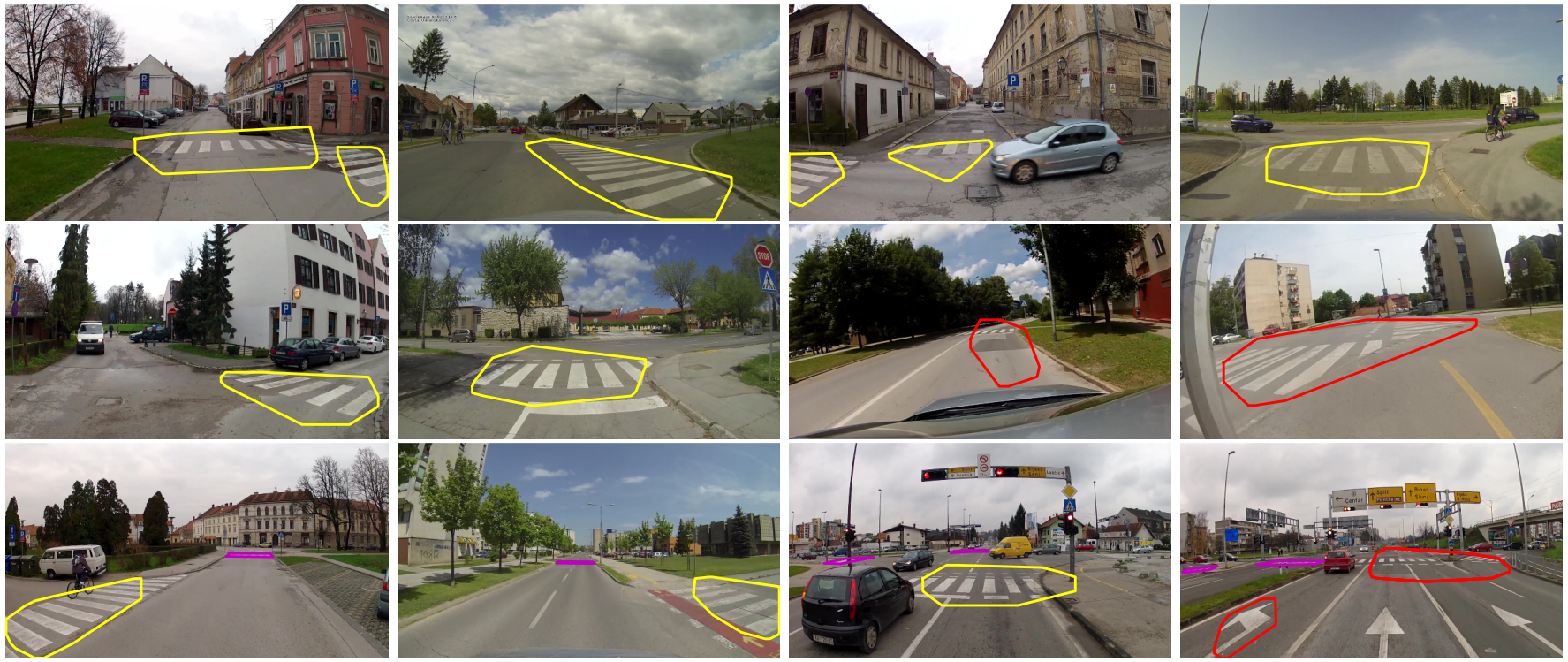
Sparse weakly supervised models for object localization in road environment
Participants : Valentina Zadrija [Univ. Zagreb] , Josip Krapac [Univ. Zagreb] , Sinisa Segvic [Univ. Zagreb] , Jakob Verbeek.
In [16] we propose a novel weakly supervised object localization method based on Fisher-embedding of low-level features (CNN, SIFT), and model sparsity at the component level. Fisher-embedding provides an interesting alternative to raw low-level features, since it allows fast and accurate scoring of image subwindows with a model trained on entire images. Model sparsity reduces overfitting and enables fast evaluation. We also propose two new techniques for improving performance when our method is combined with nonlinear normalizations of the aggregated Fisher representation of the image. These techniques are i) intra-component metric normalization and ii) first-order approximation to the score of a normalized image representation. We evaluate our weakly supervised localization method on real traffic scenes acquired from driver's perspective. The method dramatically improves the localization AP over the dense non-normalized Fisher vector baseline (16 percentage points for zebra crossings, 21 percentage points for traffic signs) and leads to a huge gain in execution speed (91× for zebra crossings, 74× for traffic signs). See Figure 12 for several example outputs.
|
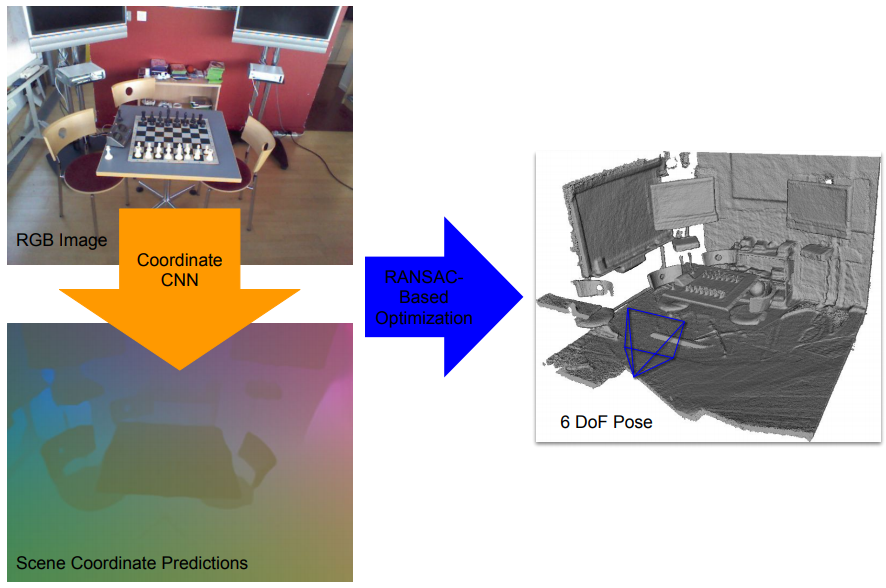
Scene Coordinate Regression with Angle-Based Reprojection Loss for Camera Relocalization
Participants : Xiaotian Li [Aalto Univ.] , Juha Ylioinas [Aalto Univ.] , Jakob Verbeek, Juho Kannala [Univ. Oulu] .
Image-based camera relocalization is an important problem in computer vision and robotics. Recent works utilize convolutional neural networks (CNNs) to regress for pixels in a query image their corresponding 3D world coordinates in the scene. The final pose is then solved via a RANSAC-based optimization scheme using the predicted coordinates, see Figure 13. Usually, the CNN is trained with ground truth scene coordinates, but it has also been shown that the network can discover 3D scene geometry automatically by minimizing single-view reprojection loss. However, due to the deficiencies of reprojection loss, the network needs to be carefully initialized. In [27], we present a new angle-based reprojection loss which resolves the issues of the original reprojection loss. With this new loss function, the network can be trained without careful initialization, and the system achieves more accurate results. The new loss also enables us to utilize available multi-view constraints, which further improve performance.
|
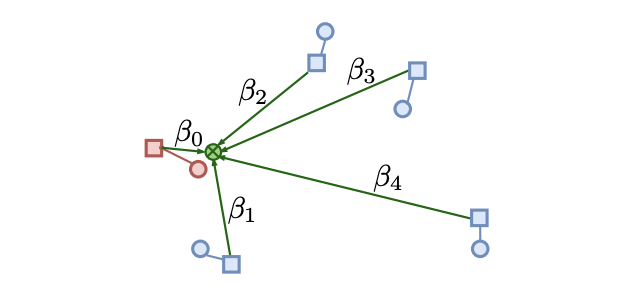
FeaStNet: Feature-Steered Graph Convolutions for 3D Shape Analysis
Participants : Nitika Verma, Edmond Boyer [Inria, MORPHEO] , Jakob Verbeek.
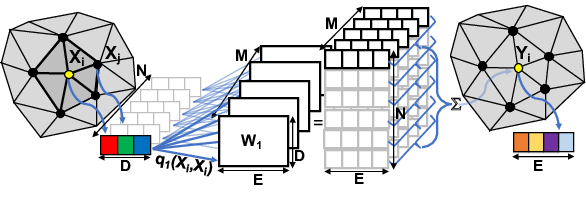
Convolutional neural networks (CNNs) have massively impacted visual recognition in 2D images, and are now ubiquitous in state-of-the-art approaches. While CNNs naturally extend to other domains, such as audio and video, where data is also organized in rectangular grids, they do not easily generalize to other types of data such as 3D shape meshes, social network graphs or molecular graphs. In our recent paper [35], we propose a novel graph-convolutional network architecture to handle such data. The architecture builds on a generic formulation that relaxes the 1-to-1 correspondence between filter weights and data elements around the center of the convolution, see Figure 14 for an illustration. The main novelty of our architecture is that the shape of the filter is a function of the features in the previous network layer, which is learned as an integral part of the neural network. Experimental evaluations on digit recognition and 3D shape correspondence yield state-of-the-art results, significantly improving over previous work for shape correspondence.
|