

Section: New Results
Statistical Machine Learning
Modulated Policy Hierarchies
Participants : Alexander Pashevich, Danijar Hafner [Google Brain] , James Davidson [Vernalis (R&D) Ltd.] , Rahul Sukthankar [Google] , Cordelia Schmid.
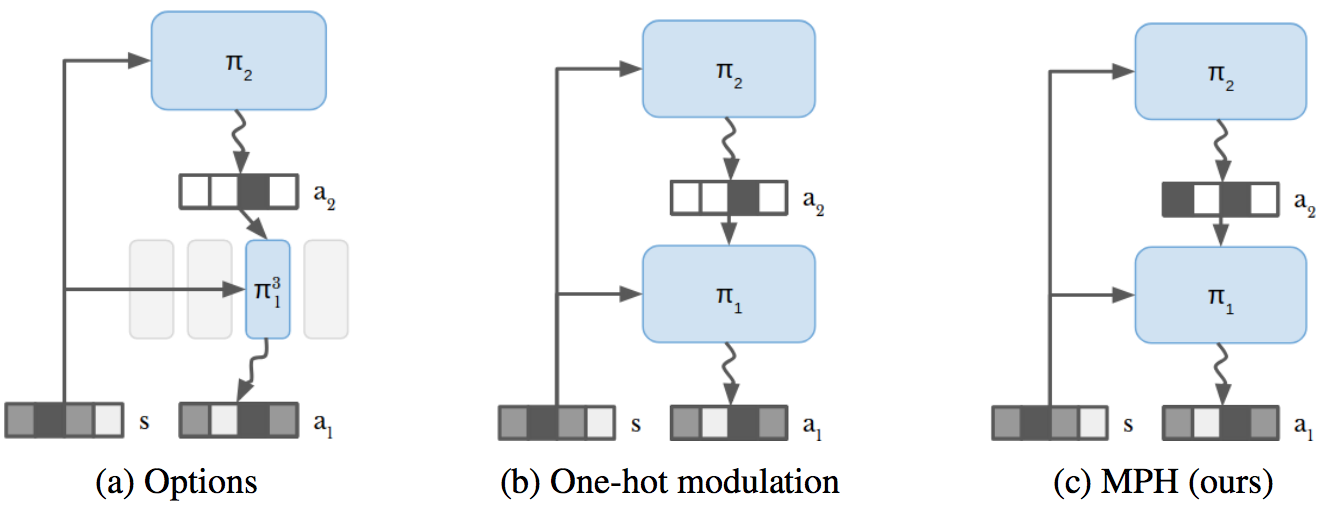
Solving tasks with sparse rewards is a main challenge in reinforcement learning. While hierarchical controllers are an intuitive approach to this problem, current methods often require manual reward shaping, alternating training phases, or manually defined sub tasks. In [45], we introduce modulated policy hierarchies (MPH), that can learn end-to-end to solve tasks from sparse rewards. To achieve this, we study different modulation signals and exploration for hierarchical controllers. Specifically, we find that communicating via bit-vectors is more efficient than selecting one out of multiple skills, as it enables mixing between them (see Figure 15). To facilitate exploration, MPH uses its different time scales for temporally extended intrinsic motivation at each level of the hierarchy. We evaluate MPH on the robotics tasks of pushing and sparse block stacking, where it outperforms recent baselines.
|
Group Invariance, Stability to Deformations, and Complexity of Deep Convolutional Representations
Participants : Alberto Bietti, Julien Mairal.
The success of deep convolutional architectures is often attributed in part to their ability to learn multiscale and invariant representations of natural signals. However, a precise study of these properties and how they affect learning guarantees is still missing. In [38], we consider deep convolutional representations of signals; we study their invariance to translations and to more general groups of transformations, their stability to the action of diffeomorphisms, and their ability to preserve signal information. This analysis is carried by introducing a multilayer kernel based on convolutional kernel networks and by studying the geometry induced by the kernel mapping. We then characterize the corresponding reproducing kernel Hilbert space (RKHS), showing that it contains a large class of convolutional neural networks with homogeneous activation functions. This analysis allows us to separate data representation from learning, and to provide a canonical measure of model complexity, the RKHS norm, which controls both stability and generalization of any learned model. In addition to models in the constructed RKHS, our stability analysis also applies to convolutional networks with generic activations such as rectified linear units, and we discuss its relationship with recent generalization bounds based on spectral norms.
A Contextual Bandit Bake-off
Participants : Alberto Bietti, Alekh Agarwal [Microsoft Research] , John Langford [Microsoft Research] .
Contextual bandit algorithms are essential for solving many real-world interactive machine learning problems. Despite multiple recent successes on statistically and computationally efficient methods, the practical behavior of these algorithms is still poorly understood. In [37], we leverage the availability of large numbers of supervised learning datasets to compare and empirically optimize contextual bandit algorithms, focusing on practical methods that learn by relying on optimization oracles from supervised learning. We find that a recent method using optimism under uncertainty works the best overall. A surprisingly close second is a simple greedy baseline that only explores implicitly through the diversity of contexts, followed by a variant of Online Cover which tends to be more conservative but robust to problem specification by design. Along the way, we also evaluate and improve several internal components of contextual bandit algorithm design. Overall, this is a thorough study and review of contextual bandit methodology.
Learning Disentangled Representations with Reference-Based Variational Autoencoders
Participants : Adria Ruiz, Oriol Martinez [Universitat Pompeu Fabra, Barcelona] , Xavier Binefa [Universitat Pompeu Fabra, Barcelona] , Jakob Verbeek.
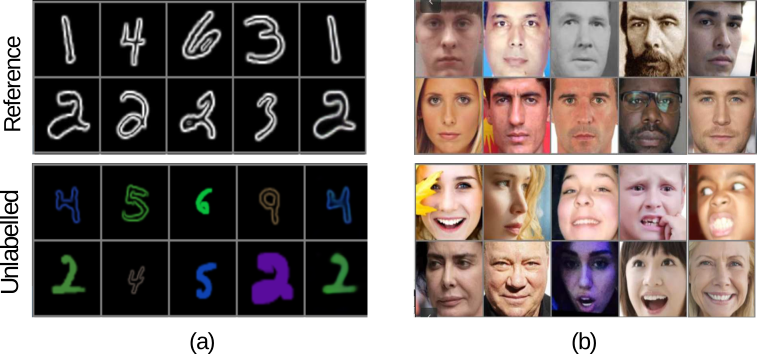
Learning disentangled representations from visual data, where different high-level generative factors are independently encoded, is of importance for many computer vision tasks. Supervised approaches, however, require a significant annotation effort in order to label the factors of interest in a training set. To alleviate the annotation cost, in [47] we introduce a learning setting which we refer to as “reference-based disentangling”. Given a pool of unlabelled images, the goal is to learn a representation where a set of target factors are disentangled from others. The only supervision comes from an auxiliary “reference set” that contains images where the factors of interest are constant. See Fig. 16 for illustrative examples. In order to address this problem, we propose reference-based variational autoencoders, a novel deep generative model designed to exploit the weak supervisory signal provided by the reference set. During training, we use the variational inference framework where adversarial learning is used to minimize the objective function. By addressing tasks such as feature learning, conditional image generation or attribute transfer, we validate the ability of the proposed model to learn disentangled representations from minimal supervision.
|
On Regularization and Robustness of Deep Neural Networks
Participants : Alberto Bietti, Grégoire Mialon, Julien Mairal.
For many supervised learning tasks, deep neural networks are known to work well when large amounts of annotated data are available. Yet, Despite their success, deep neural networks suffer from several drawbacks: they lack robustness to small changes of input data known as “adversarial examples” and training them with small amounts of annotated data is challenging. In [39], we study the connection between regularization and robustness of deep neural networks by viewing them as elements of a reproducing kernel Hilbert space (RKHS) of functions and by regularizing them using the RKHS norm. Even though this norm cannot be computed, we consider various approximations based on upper and lower bounds. These approximations lead to new strategies for regularization, but also to existing ones such as spectral norm penalties or constraints, gradient penalties, or adversarial training. Besides, the kernel framework allows us to obtain margin-based bounds on adversarial generalization. We show that our new algorithms lead to empirical benefits for learning on small datasets and learning adversarially robust models. We also discuss implications of our regularization framework for learning implicit generative models.
Mixed batches and symmetric discriminators for GAN training
Participants : Thomas Lucas, Corentin Tallec [Inria, TAU] , Jakob Verbeek, Yann Ollivier [Facebook AI Research] .
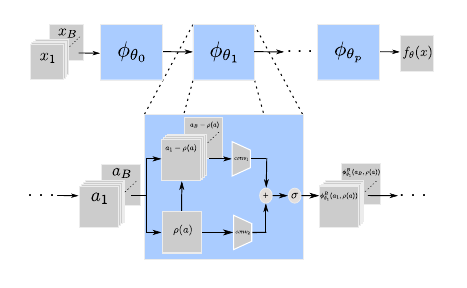
Generative adversarial networks (GANs) are powerful generative models based on providing feedback to a generative network via a discriminator network. However, the discriminator usually assesses individual samples. This prevents the discriminator from accessing global distributional statistics of generated samples, and often leads to mode dropping: the generator models only part of the target distribution. In [29] we propose to feed the discriminator with mixed batches of true and fake samples, and train it to predict the ratio of true samples in the batch. The latter score does not depend on the order of samples in a batch. Rather than learning this invariance, we introduce a generic permutation-invariant discriminator architecture, which is illustrated in Figure 17. This architecture is provably a universal approximator of all symmetric functions. Experimentally, our approach reduces mode collapse in GANs on two synthetic datasets, and obtains good results on the CIFAR10 and CelebA datasets, both qualitatively and quantitatively.
|
Auxiliary Guided Autoregressive Variational Autoencoders
Participants : Thomas Lucas, Jakob Verbeek.
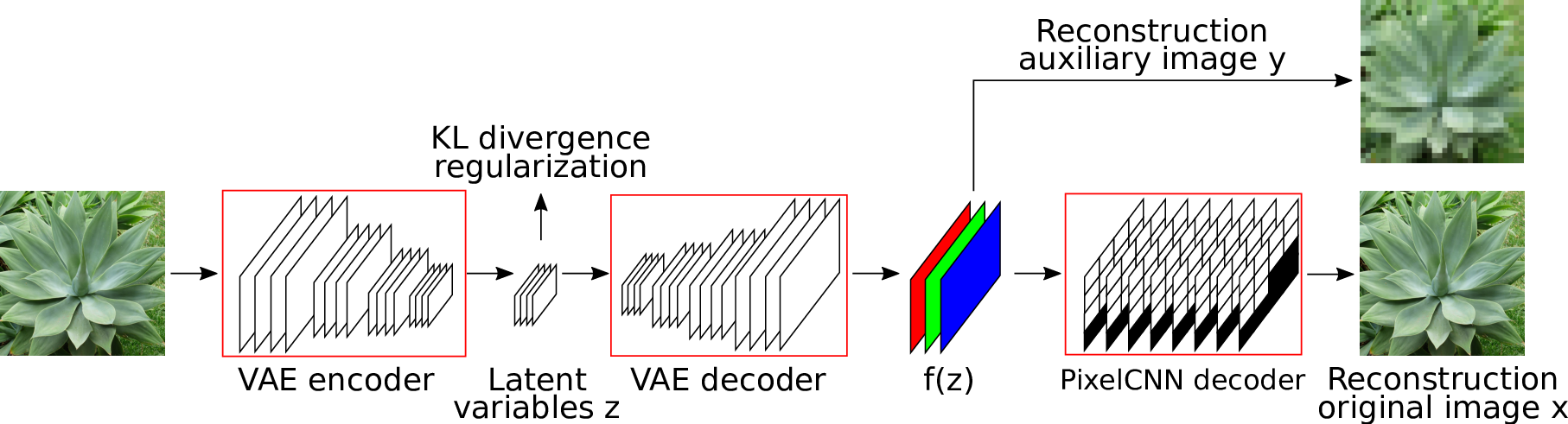
Generative modeling of high-dimensional data is a key problem in machine learning. Successful approaches include latent variable models and autoregressive models. The complementary strengths of these approaches, to model global and local image statistics respectively, suggest hybrid models combining the strengths of both. Our contribution in [30] is to train such hybrid models using an auxiliary loss function that controls which information is captured by the latent variables and what is left to the autoregressive decoder, as illustrated in Figure 18. In contrast, prior work on such hybrid models needed to limit the capacity of the autoregressive decoder to prevent degenerate models that ignore the latent variables and only rely on autoregressive modeling. Our approach results in models with meaningful latent variable representations, and which rely on powerful autoregressive decoders to model image details. Our model generates qualitatively convincing samples, and yields state-of-the-art quantitative results.
|
End-to-End Incremental Learning
Participants : Francisco Castro [Univ. Malaga] , Manuel Marin-Jimenez [Univ. Cordoba] , Nicolas Guil [Univ. Malaga] , Cordelia Schmid, Karteek Alahari.
Although deep learning approaches have stood out in recent years due to their state-of-the-art results, they continue to suffer from catastrophic forgetting, a dramatic decrease in overall performance when training with new classes added incrementally. This is due to current neural network architectures requiring the entire dataset, consisting of all the samples from the old as well as the new classes, to update the model—a requirement that becomes easily unsustainable as the number of classes grows. We address this issue with our approach [17] to learn deep neural networks incrementally, using new data and only a small exemplar set corresponding to samples from the old classes. This is based on a loss composed of a distillation measure to retain the knowledge acquired from the old classes, and a cross-entropy loss to learn the new classes. Our incremental training is achieved while keeping the entire framework end-to-end, i.e., learning the data representation and the classifier jointly, unlike recent methods with no such guarantees. We evaluate our method extensively on the CIFAR-100 and ImageNet (ILSVRC 2012) image classification datasets, and show state-of-the-art performance.